

《Science Robotics》发表哈工程新成果:电液驱动软体机器人解锁深海探测新路线
2025年08月15日 14:29
本文共计333个字,预计阅读时长2分钟。
来源/机器人大讲堂
责编/爱力方
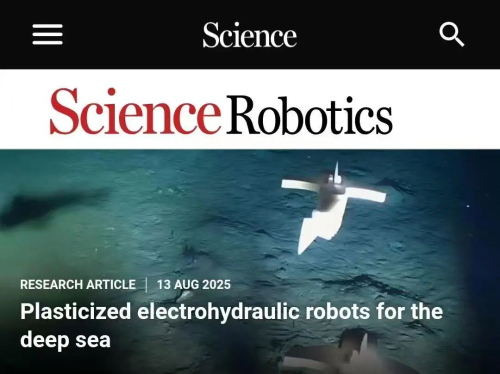
8月14日,国际学术顶刊《科学·机器人》《Science Robotics》杂志表哈尔滨工程大学船舶工程学院最新研究成果“电液驱动深海软体机器人”。
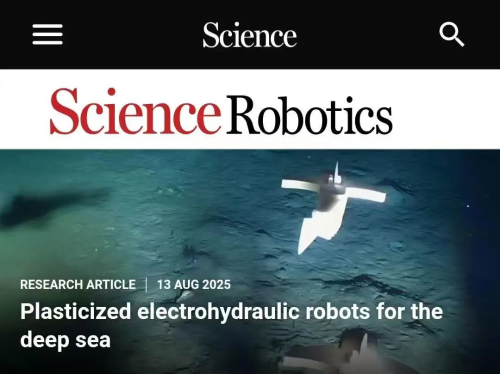
课题组联合浙江大学、中国船舶科学研究中心等相关团队历经多年探索,研制出电液驱动深海软体机器人,并在1369米深度冷泉区和4070米深度海山区等多个海域开展了探测应用。
机器人通过自身携带的小型化能源控制系统实现电液单元协同驱动,当软基体中的电子器件产生高压电信号时,柔性电液单元会在电压信号的激励下产生类似流体静力骨骼的变形模式,使其在深海环境下实现直行、转弯等多种轨迹路径
。此外,该软体机器人集成了微型深海光学感知系统,可以在深海极端环境下完成对自身运动状态、环境目标的实时感知,使小尺度软体机器人具备深海近底感知能力。
声明:本文来自机器人大讲堂,版权归作者所有。文章内容仅代表作者独立观点,不代表A³·爱力方立场,转载目的在于传递更多信息。如有侵权,请联系 copyright#agent.ren。
15
0














