

央视报道!哈工程最新研制成果“机器鱼”,4000米深海行动自如!
在4070米水深的幽暗海山区,一条长约32厘米、翼展约18厘米、重量仅670克、通体洁白的“鱼”正在灵活游弋。其全身质地柔软,展现出非凡的深海适应性。

相较于陆地上已屡见不鲜的空翻、越野机器人,在深邃高压、环境极端复杂的深海,传统刚性机器人往往举步维艰。深海探测的特殊需求,使得软体机器人技术因其柔顺的机身、极小的环境干扰以及出色的环境压力适应能力,成为更理想的深海探索解决方案。
然而,现有的深海软体驱动方案仍面临技术瓶颈:液压系统虽能量密度高且能实现多模态变形,但其依赖笨重的泵和调压部件,难以实现紧凑灵活的设计;形状记忆合金(SMA)驱动幅度大,但能效低、速度慢;介电弹性体(DE)驱动器可在无缆环境下工作,但材料需预拉伸,变形模式简单,难以支撑深海的复杂任务。
因此,电静液作动器(Electro-Hydraulic Actuator, EHA)系统——它通过内部电介质液体的重分布实现推进和压力自平衡,无需依赖外部泵——成为深海移动软体机器人极具前景的驱动方案。2022年,哈尔滨工程大学李国瑞教授牵头的研究团队从经典物理现象“电致流动”中获得灵感,开创性地启动了电液驱动深海软体机器人的研究。近日,该研究成果以“Plasticized electrohydraulic robot autopilots in the deep sea”为题发表于国际顶级期刊 Science Robotics,并获得央视新闻频道及Science官网首页的专题报道。
▍集成设计与深海机动:打造深海“软体鱼”
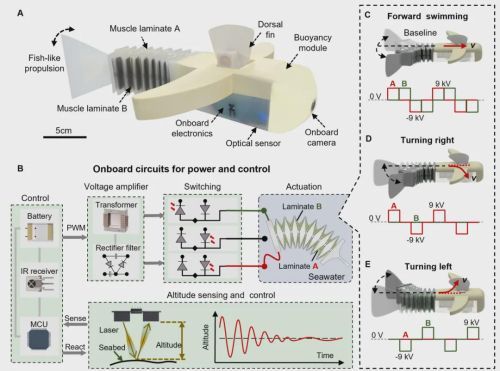
基于创新的电液驱动原理,研究团队成功研制出一款长32厘米、翼展18厘米、仅重670克的软体机器人原型。其设计特点是具有用于深海推进的波浪形尾部、两个用于稳定和防侧倾的胸鳍式浮力模块、一个与光学传感模块配对的电磁背鳍,用于闭环高度调节,以及一个用于水下调查的集成摄像头。根据预先设定的高度点,软体机器人与海床之间的距离可由光学传感器持续监测,并由背鳍调节单侧施加周期性电压即可实现灵活转向。
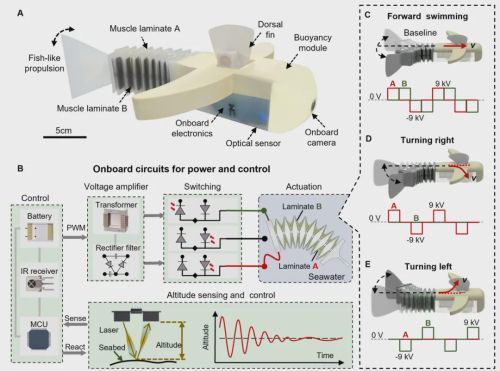
软体机器人的整体设计和原型示意图
此外,该软体机器人集成了微型深海光学感知系统,可以在深海极端环境下完成对自身运动状态、环境目标的实时感知,使小尺度软体机器人具备深海近底感知能力。
而所有电子元件,包括MCU、光学传感器、高压放大器等元件采用分散式排列并嵌入3D打印模具,灌注硅树脂固化形成软电子舱,有效减轻界面剪切应力。光学传感模块置于液体填充外壳内,消除气隙,确保极端静水压力下的正常工作。
▍核心突破:电液驱动的深海转化
支撑这台灵活深海机器人的,是团队在电液驱动技术的核心突破。具体而言,研究团队成功将“电致流动”转化为适用于深海极端环境的柔性驱动机制。其设计的电液驱动单元由薄膜壳体、柔性电极和内部介电液体构成。施加静电场可调控介电液体有序流动,将电场力(麦克斯韦应力)高效转化为驱动力,精确控制柔性单元变形。
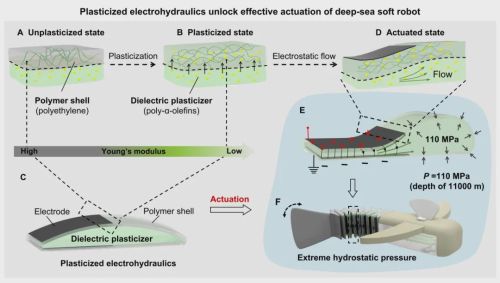
塑化电液驱动示意图
同时,团队深入研究了单元在高压低温下的力电耦合大变形效应,赋予系统优异变形能力。单元内部介电液体能与外部海水压力自适应平衡,使系统天生具备全海深压力适应性。
然而,深海环境带来的挑战依旧严峻。极高静水压力下,驱动单元材料模量剧增,机器人变得“僵硬”,导致驱动幅度和速度衰减;更棘手的是,高压低温协同作用还导致介电液体粘度急剧升高、柔性外壳杨氏模量剧增,这些因素共同“禁锢”了电液驱动器实现大动态变形的能力,严重削弱了机器人的机动性能。
为了克服这一挑战,在多次尝试之后,团队提出了创新的“柔性电液单元液—固塑化机制”及“电液、塑化介质一体化”策略。该方案引入了低粘度液体介电增塑剂,扮演了双重关键角色:作为聚合物外壳的软化剂,维持其柔软性、减轻硬化;以及作为深海条件下力传递的高效电液流体。
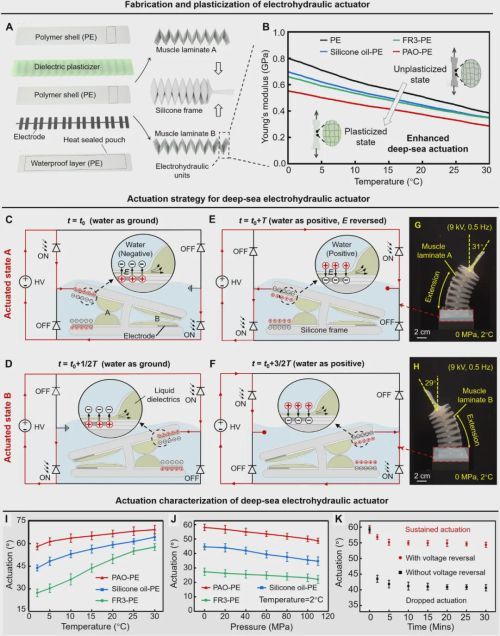
塑化深海电液装置设计及驱动原理
应用了该电液驱动原理的机器人,通过自身携带的小型化能源控制系统实现电液单元协同驱动,当软基体中的电子器件产生高压电信号时,柔性电液单元会在电压信号的激励下产生类似流体静力骨骼的变形模式,使其在深海环境下实现直行、转弯等多种轨迹路径。这一机制显著提升了机器人在高压低温双重枷锁下的大变形响应能力与机动性。
▍深海实考,验证可靠性能
在扎实的理论计算和实验室环境测试验证了机器人在高压低温下的驱动、推进及感知能力后,研究团队在广东智能无人系统研究院、广州海洋地质调查局、浙江大学、中国船舶科学研究中心等单位的联合支持下,将目光投向真实海洋。
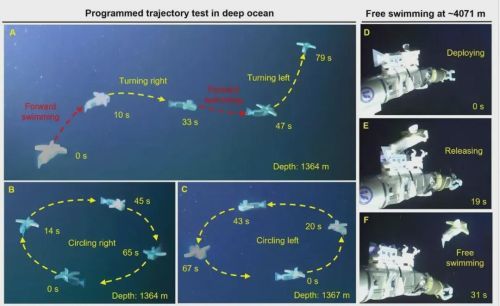
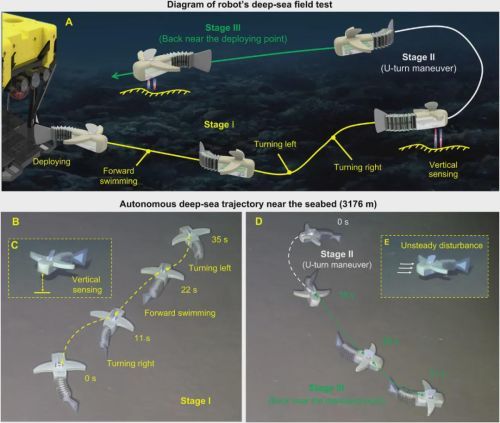
2024年6月13日: 机器人在南海3176米深度成功布放。海试影像清晰记录其在复杂水流中,出色完成复杂轨迹运动、近底感知探测、自主姿态调控及返航等任务,证实了极端压力与复杂流场下的可靠机动性与感知能力。
深海不同深度现场试验
2024年7月4日至6日: 在海马冷泉区多次布放,成功实现约1369米深度下的低扰动探测。
深海中复杂轨迹的航行
2024年7月9日: 搭载“海星”号6000米级深海ROV,在约4070米深度的海山区开展航行试验,成功探索了深海潜水器与小型软体机器人协同作业的可行性,为未来大范围、低扰动深海探测提供了新路径。
▍结语与未来
海洋,这片覆盖地球大部分表面的神秘领域,其探索始终充满挑战。如今,人工智能、机器人等技术的迅猛发展正极大推动海洋开发利用,海洋经济已成为沿海地区重要增长点。
深海软体机器人作为其中的“新物种”,其独特价值在于,利用创新的柔性电液驱动与材料技术(例如上述液-固塑化机制),突破了深海高压对传统机器人的刚性限制。这种能承受数千米水压、在极端环境下自主/遥控作业、具备近底感知能力且能实现低扰动探测的柔性平台,为人类深入探索未知深海(海洋科学研究、资源勘探、环境监测等)提供了前所未有的强大工具。它标志着深海探测技术向更灵活、适应性更强、扰动更小的方向迈出了关键一步,开启了深海探索的新纪元。
论文链接:https://www.science.org/doi/10.1126/scirobotics.adt8054












