

Science子刊:注意力机制+RL实现腿足机器人精确控制,100%障碍穿越成功率
2025年09月13日 07:32
本文共计332个字,预计阅读时长2分钟。
来源/机器人大讲堂
责编/爱力方
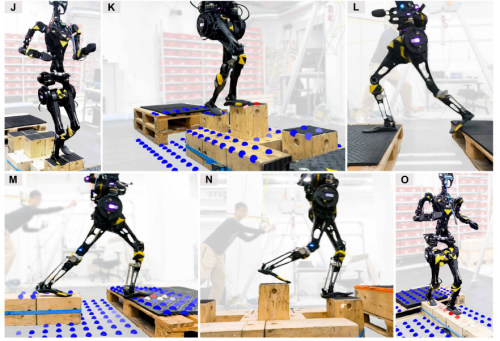
苏黎世联邦理工学院机器人系统实验室(RSL)在《Science Robotics》中提出了一种创新的控制框架,通过结合强化学习和多头注意力机制(MHA),让机器人能够“专注”于地形中的关键信息,自主选择最优落脚点。
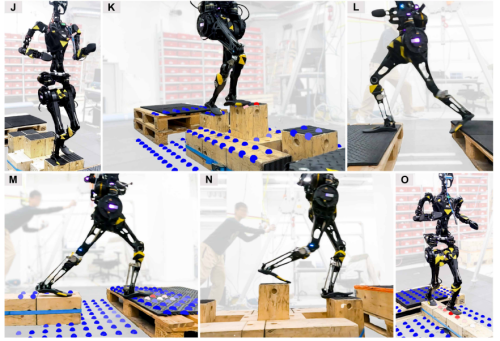
通过将机器人本体觉感知数据与外部地形数据结合,利用MHA模块,机器人能够根据当前的状态和环境,精确预测未来的支撑点。这一方法的最大亮点在于,它不仅仅依赖于传统的感知数据,还能根据机器人实时的运动状态动态调整对地形的关注,从而提高了机器人对复杂地形的适应性。
无论是GR-1还是ANYmal-D机器人,都在实验和实际环境中表现出色,成功应对了未曾见过的复杂地形。通过不断学习和适应,机器人能够在各种复杂地形上实现精准的运动控制,开辟了更多实际应用的可能性。
声明:本文来自机器人大讲堂,版权归作者所有。文章内容仅代表作者独立观点,不代表A³·爱力方立场,转载目的在于传递更多信息。如有侵权,请联系 copyright#agent.ren。














