出品:机器人新材料
近日,宇树科技股份有限公司申请的实用新型专利—— “一种机器人腿部结构和足式机器人”获得授权。从公开的专利摘要及结构示意图来看,该专利围绕足式机器人腿部的动力单元布置方式 进行了针对性优化,是一项典型的、以工程可实现性和系统集成为核心目标的结构创新。
Part.01
专利核心设计:动力单元内置于大腿结构

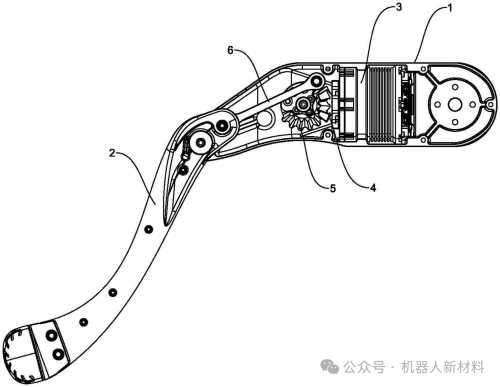
专利图 1
根据专利摘要,该机器人腿部结构主要由以下部件构成:
大腿杆件
小腿杆件
驱动小腿杆件相对大腿杆件转动的小腿动力单元
核心创新点在于:将原本通常与大腿动力单元并列布置的小腿动力单元,整体置入大腿杆件内部。改变了传统足式机器人中较为常见的“上下动力单元并排外置”结构形式,使腿部在横向尺寸与外形轮廓上更加紧凑。
Part.02
与传统结构的对比分析

专利图 2
在传统足式机器人腿部设计中,小腿关节驱动通常具备以下特征:
小腿动力单元与大腿动力单元在结构上并列布置
驱动电机、减速机构及传动组件多外置于关节附近
腿部横向尺寸较大,对机身宽度形成约束而该专利方案通过动力单元纵向重叠与内嵌式集成 ,在结构层面带来几项直接变化:
减少横向占用空间动力单元不再在腿部侧向展开,有助于缩小整机横截面尺寸。
腿部外形更接近“杆状结构”有利于足式机器人在狭窄环境中行走、转向或通过障碍。
机身宽度随之减小,这是专利摘要中明确指出的系统级效果,属于结构调整带来的直接工程收益。
Part.03
工程层面的实际意义
从足式机器人整机设计角度来看,该专利所解决的问题并非单一关节性能,而是系统集成密度与整机尺度控制
-
有利于整机紧凑化设计
足式机器人在实际应用中(巡检、科研、工业或复杂地形行走)往往面临:
空间受限
结构干涉风险
外露部件易受冲击
腿部动力单元内置,有助于降低外形复杂度,提升结构一体化水平。
2. 为多足或高自由度系统预留设计余量在四足及多足机器人中,腿部结构的宽度直接影响:
多腿之间的安装间距
中央机身可用空间
电池、控制器、传感器的布局灵活性
该专利通过压缩腿部尺寸,为系统级布局提供更多工程余量。
3. 有助于结构防护与可靠性设计动力单元置于大腿杆件内部,在工程上通常也意味着:
更易实现外壳防护
降低外露电机、线缆受到碰撞或污染的风险
对面向真实环境运行的足式机器人尤为重要。
Part.04
与宇树科技技术路线的契合性
结合宇树科技在足式机器人领域的公开产品和技术方向,一贯特点包括:
高集成度的机电一体化设计
强调整机轻量化与紧凑布局
注重工程可量产性与稳定性
从这一角度看,本专利服务于实际产品工程落地的结构优化方案。
Part.05
提升整机紧凑性
总体来看,宇树科技此次获授权的腿部结构专利,技术路线清晰、目标明确,核心价值在于通过动力单元内置与空间重排 ,提升足式机器人腿部及整机的紧凑性。这类结构层面的持续优化,是足式机器人从实验平台走向稳定产品形态过程中不可或缺的基础工作。