具身智能领域迎来里程碑式进展。高德于今日正式宣布全量开源全球首个基于统一架构的机器人具身操作基座模型 ABot-M0。该模型核心定位于实现“一个通用大脑适配多种形态机器人”,旨在打破异构硬件间的壁垒,加速具身智能从实验室走向工业与家庭场景。
核心技术与性能表现
ABot-M0在多项行业权威基准测试中展现了卓越的性能。数据显示,该模型在 Libero-Plus 基准上的任务成功率高达 80.5%,相比此前业界的标杆方案 Pi0提升了近 30%。此外,它在 Libero 和 RoboCasa 等测试中均刷新了 SOTA(业内最顶尖)纪录。

三大维度的全量开源
为了解决具身智能领域长期存在的“数据孤岛”与“部署困难”痛点,高德此次开源涵盖了底层数据、核心算法与预训练模型三大维度:
-
数据层面: 开源了目前规模最大的通用机器人数据集 UniACT。该数据集整合了超过 600万条 真实操作轨迹,并配套提供从异构数据到标准化训练数据的全流程处理管线。
-
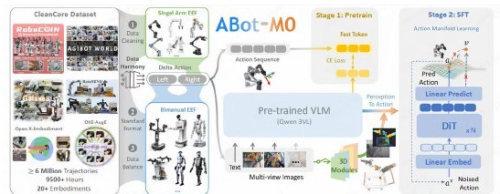
算法层面: 同步公开了模型架构与训练框架,核心亮点包括高德创新的 动作流形学习(AML)算法 以及 双流感知架构,赋予了机器人卓越的空间理解与动作执行能力。
-
模型层面: 提供端到端的预训练模型及完整工具链。开发者可以实现“开箱即用”,无需从零搭建框架,极大降低了适配工业协作或家庭服务机器人的门槛。
行业影响
高德 ABot-M0技术负责人表示,真正的通用具身智能需要全球开发者的共同打磨。ABot-M0的开源不仅是技术的分享,更是希望构建起连接学术研究与产业应用的桥梁,让每一台不同形态的机器人都能拥有聪明、可靠且通用的“大脑”。