传统的具身智能载体,无论是四足机器狗还是昂贵的人形机器人,在面对坠落、撞击或非结构化地形,如沙地、草地时,脆弱的刚性关节和减速机往往抗冲击的薄弱环节。
最近,耶鲁大学和罗格斯大学的研究团队在权威期刊《IEEE Robotics and Automation Letters 》上发表了一项新成果,他们展示了一套完整的全开源张拉整体机器人,不仅硬件便宜耐造,还能在斜坡、沙地、甚至户外自主导航。关键是,该系统可复选,别人照着图纸也能造出一模一样的。

01.
杆子+绳子,反而更稳?
传统的机器人,不管是轮式的还是腿式的,最怕的就是摔。但张拉整体机器人恰好相反,它天生就是“软”的。它的结构由刚性杆和弹性绳索组成,受力时会发生形变,把冲击能量分散掉。这种机器人具有自重轻、高抗冲击性、对非结构化地形适应性强的特点。
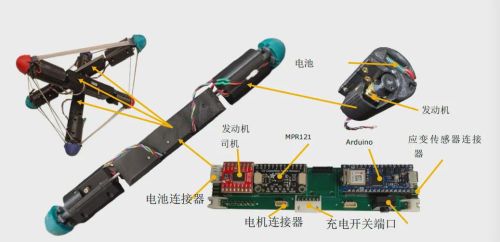
具体到这款机器人,它用了3根刚性杆,每根杆的两端各有一个电机和电池舱,杆与杆之间通过9根“肌腱”连接。其中6根是主动的,由电机驱动,另外3根是被动的恢复弹簧。每根主动肌腱上都集成了电容式应变传感器,可以实时测量长度变化,实现闭环控制。
整机重量和尺寸论文没有直接给一个数字,但从设计图看,每根杆大概30-40厘米长,电机、电池、PCB全部塞在杆子里,结构非常紧凑。
有意思的是,每根杆都是一个独立的电子单元,自带Arduino Nano 33 IoT、电机驱动、LiPo电池和WiFi模块。这意味着你可以把这3根杆拆开重新拼成其他拓扑结构,模块化程度很高。
02.
怎么让它自己找路?
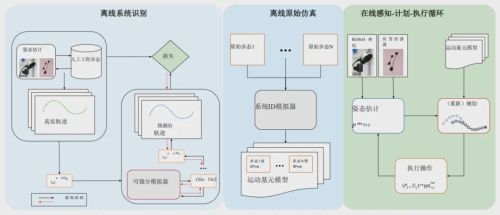
张拉整体机器人的动力学非常复杂,传统的运动学模型很难精确描述。为了解决这个问题,团队采用“离线建模+在线重规划”方法。
他们先手工设计了几种“步态”,比如向前滚动、顺时针转弯、逆时针转弯。然后让机器人在真实环境中执行这些步态,同时用顶部的静态相机(Intel RealSense L515)和机载应变传感器来追踪位姿。这些数据被用来训练一个可微分物理引擎,优化出最匹配真实运动的系统参数,包括摩擦系数、恢复系数、鲍姆加特稳定系数等。
优化完成之后,就可以在仿真中跑了。运动基元库共生成11种运动基本单元,每种基元对应一个固定的控制序列(一组6根肌腱的目标长度),执行完后机器人会落到一个新的位姿。
有了这个运动基元库,路径规划就变成了一个离散图搜索问题,每个节点是机器人的一个位姿,每条边是一个运动基元。
03.
开环不行,闭环才行
研究团队对比了开环和闭环两种控制方式的成功率。
开环控制就是一次规划好整条路径,然后让机器人按规划执行到底。结果在10次实验中,只有1次成功到达目标,另外3次直接撞上障碍物,还有6次中途就卡住、没能滚到终点。
为什么这么惨?因为运动基元的实际执行效果和模型预测总有偏差,一次偏差不大,但多次累积下来,机器人就偏到不知道哪里去了。
闭环控制就好多了。每执行完一个运动基元,就重新规划一次。相机以 7Hz 的频率实时追踪位姿,规划器根据当前位置重新计算下一步。10次实验中,8次成功到达目标,2次撞到障碍物,没有出现半路卡死的情况。

这种闭环控制方案规划一次的平均耗时大约是 0.5 秒,对实时控制来说足够了。
04.
37cm坠落重生到跨介质地形导航
张拉整体机器人最让人兴奋的特点是它的鲁棒性。研究团队做了几个“毁模型”的实验,非常有意思。
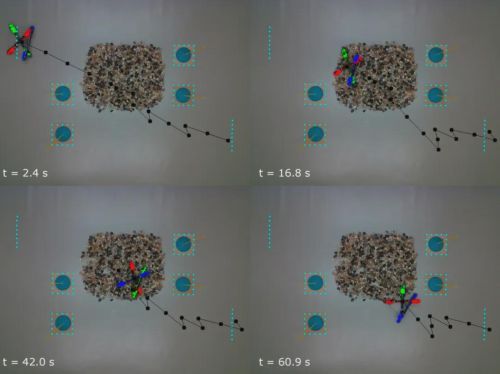
- 垂直跌落
机器人从一个37厘米高的台架上执行第一个动作,直接滚落下来。这个高度远超过它的自身尺寸,落地后的位姿和模型预测完全不一样。但位姿追踪器成功捕捉到了新位置,重规划器立刻生成了一条新路径,机器人继续完成任务。
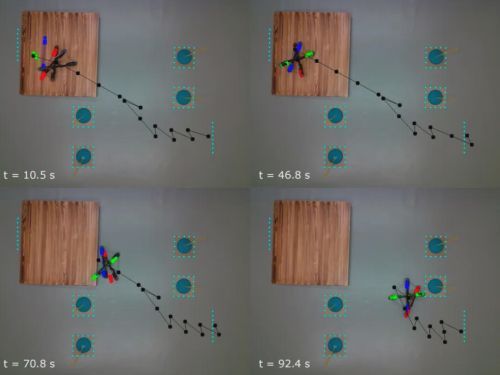
- 斜坡
在一个8° 的木制斜坡上导航。运动基元是在平地上建模的,在斜坡上执行出来的变换完全不一样。而且斜坡的颜色还干扰了视觉追踪,中间有一段位姿估计不太准。但最终机器人还是成功翻过了斜坡,完成了整个障碍物赛道。
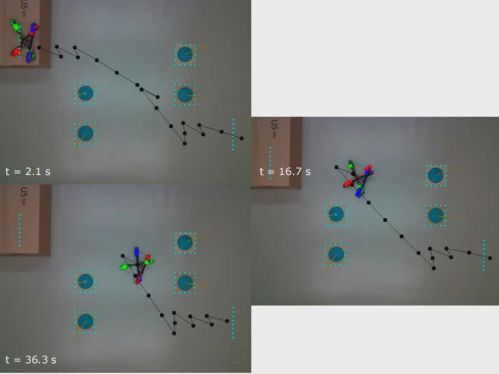
- 颗粒介质
在一个装满颗粒状介质的沙盘里跑。机器人在沙地上的运动特性和平地完全不同,物理引擎的预测基本失效。但闭环控制仍然有效,每走一步就重新规划,最终也成功到达了目标。
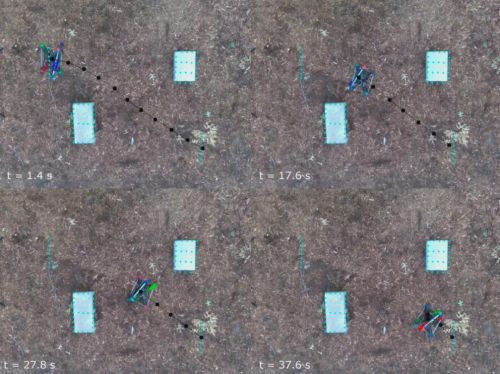
- 户外
团队还把机器人搬到了室外。因为室内的激光雷达相机(L515)在阳光下没法用,他们换成了立体相机(D435),重新标定了一下颜色滤波器的参数,然后让机器人在草地上绕着障碍物跑了一圈,结果很成功。
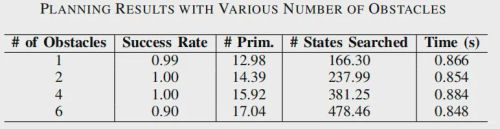
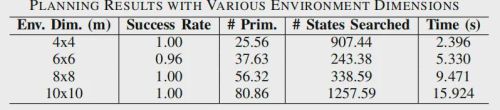
此外,研究团队里还做了两个仿真实验,分析障碍物密度和环境大小对规划的影响。
当障碍物数量从1个增加到6个时,成功率在5个障碍物以下都是100%,到6个时降到了90%。规划搜索的状态数从166增加到478,但每次规划的时间反而没什么变化(0.85秒左右),因为主要的计算开销是启发式函数,占了平均0.768秒。
当仿真环境从4米×4米扩大到10米×10米时,一次重规划的时间从约2.4秒增加到近16秒。团队建议,在超大空间中引入中间目标点或检查点,把长路径拆成多段,可以有效降低计算压力。
05.
全开源,按图纸可以造出一样的
这项研究的一大卖点是可复现性。团队专门设计了一个开源版本的硬件,所有设计文件(CAD)、电路图、BOM清单、装配说明,以及整套ROS软件包都可以在tensegrity.yale.edu网站上获取。
更硬核的是,他们找了两个不同的实验室,各自独立照着图纸造了一台机器人,然后跑到同一个测试场景里跑导航实验。结果呢?都能成功完成任务,而且用的还是同一套运动模型,没有针对新机器人重新做系统辨识。
这就说明了两件事:第一,这套硬件确实能复现;第二,闭环控制可以弥补不同机器人之间的个体差异。
06.
有什么用?
张拉整体机器人目前最大的应用场景是极端环境下的探测,比如行星探测、灾害搜救、管道巡检。因为它耐摔、轻便、能适应各种复杂地形。
这项工作的最大贡献,其实是提供了一个开源的、完整的、可复现的导航基线。以后其他研究者想在这个方向上前进,不用再从零开始搭硬件、写控制、调参。直接用这套系统,然后专注于自己的创新点,比如动态障碍物避障、机载感知、多机器人协作等等。
论文最后也提到了未来方向。目前假设障碍物是静态的,下一步可以支持移动障碍物;目前依赖外部相机,未来可以集成机载传感器,比如UWB或深度相机,实现完全自主。
论文链接:
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=11474858