


在科幻电影中,空间站里常有一种灵巧穿梭、自主作业的小型飞行器。如今,这种想象正逐渐照进现实,一款重量仅600克、直径9厘米的微型自主飞行机器人,刚刚在学术舞台上惊艳亮相。
近日,哈尔滨工业大学的科研团队在国际顶级期刊上发表论文,提出一种名为FRDP的新型空间站自由飞行机器人。与以往同类机器人相比,它不仅体积小、重量轻,还独创性地设计了双模态推进系统:既能像节能车一样安静巡航,又能像特技飞行器一样灵活机动。
这意味着,未来在空间站狭小环境中,机器人既可以执行长时间、大范围的巡检任务,也能完成高精度、多角度的拍摄与检测工作。而这背后,隐藏着一套精巧的机械与算法智慧。
▍空间站的新员工:从冗余设计到矢量推进
人类探索太空的步伐不断加快,航天员在轨参与科学实验的任务也日益增多。然而,许多日常、重复性的工作如果由航天员手动完成,在有限的在轨时间内效率并不高。
过去十余年,利用自由飞行机器人进行巡检、传感器读数等远程作业,逐渐成为空间站运维的有效方式。早期的飞行机器人大多依赖压缩空气推力器,但其需要人工更换消耗品,使用不够便利。后来,采用风扇推进的机器人逐渐发展起来。
例如,国际空间站上的Int-Ball机器人,虽然能够全方位移动、执行拍摄和巡检,但由于过分追求小型化,其负载能力有限,自主避障和定位能力也受到制约;Astrobee虽然自主能力强,但体积和重量也相对较大等等。
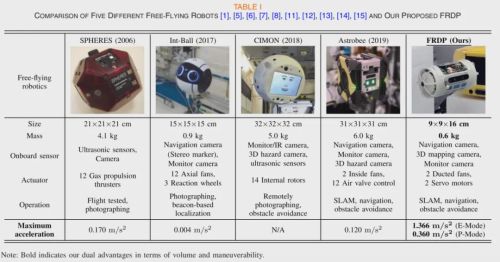 五种不同⾃由⻜⾏机器⼈与FRDP的⽐较
五种不同⾃由⻜⾏机器⼈与FRDP的⽐较
航天器载荷寸土寸金,空间站内部空间同样宝贵。如何在小型化与高性能之间取得平衡,成为自由飞行机器人设计的关键挑战。
传统推进器通常只能产生单一方向的推力,为了实现多自由度的运动与姿态控制,大多数机器人采用多个推力器+飞轮的冗余配置方案,但这不可避免地增加了机器人的重量与体积。
更关键的是,在执行特定方向的移动或姿态调整时,往往只有少数推进器在工作,其余则处于闲置状态,这导致整个推进系统的利用率不高,也造成了能源的浪费。
有没有可能减少推进系统的冗余,同时保持甚至增强其机动性?研究团队将目光投向了矢量推进技术。
▍灵感来自直升机:双矢量推进结构如何工作?
矢量推进并非新概念,直升机的旋翼桨距调节就是典型例子:通过改变桨叶角度,即可调整推力的方向与大小。
但传统直升机那样的结构对于微型空间机器人来说过于复杂脆弱。
哈工大团队提出了一种更简洁、可靠的双矢量推进模块,并将其集成在直径仅9厘米的圆柱形机身两侧。
每个推进模块主要由一个涵道风扇、一个导流片、一个齿轮电机和一个磁编码器组成。涵道风扇负责产生基础推力,而导流片则像一扇可以转动的风向门,通过改变气流喷射方向,从而控制推力输出的方向。
关键在于,每个推进模块产生的推力方向与大小均可独立调节。通过左右两个模块的协同配合,即可合成出三维空间中的力与力矩,实现对机器人六自由度(前后、左右、上下、俯仰、偏航、滚转)的精确控制。
此外,导流片外表面还设计有叶片,当其旋转时会产生空气阻力,从而额外产生俯仰方向的控制力矩,进一步增强了姿态调整能力。
在这一创新结构加持下,仅用四个执行器(两个风扇+两个伺服电机)就能实现六自由度的全向控制,大幅减少了推进系统的冗余与重量。
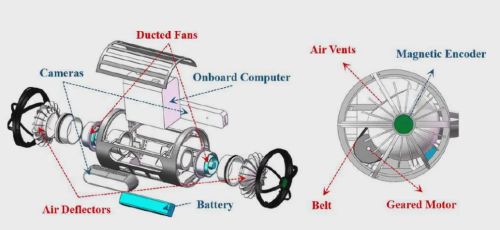 FRDP的分解图和机械设计
FRDP的分解图和机械设计
▍两种模式,一种机器人:能省电还会耍杂技
如果说创新的机械设计赋予了FRDP一身好筋骨,那么双模态控制策略则为其注入了能适应不同任务的智慧大脑。
研究团队为FRDP设计了两种可切换的工作模式:
节能模式:适用于长距离巡航、巡检等任务。在该模式下,导流片保持固定角度,引导气流集中沿机器人主轴线方向喷射,形成聚焦、定向的气流场。这种方式能量利用效率最高,能最大程度延长续航时间,犹如机器人的巡航模式。
性能模式:适用于需要高机动性、精确位姿控制的任务,如跟踪拍摄、设备近距离检测等。此时,两个推进模块的导流片保持连续旋转,通过精准控制风扇在旋转周期特定时刻的开关,可在特定方向上产生等效推力。同时,旋转的导流片与空气摩擦产生额外气动扭矩,进一步增强姿态调整能力。
这好比机器人的特技模式,虽然能耗较高,但获得了更宽广的推力矢量调节范围和更敏捷的机动能力,甚至能实现类似原地转向、横向平移等复杂动作。
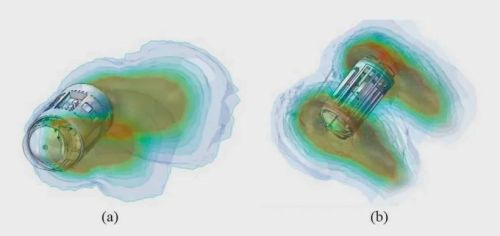 FRDP的⽓流场。(a) FRDP在节能模式下的⽓流场。(b) FRDP在性能模式下的⽓流场。
FRDP的⽓流场。(a) FRDP在节能模式下的⽓流场。(b) FRDP在性能模式下的⽓流场。
团队通过仿真与理论分析证明:对于同样的实际推力输出,性能模式在机器人主平面内能产生的最大等效推力仅为节能模式的约1/π,机动性的提升确实以牺牲能量效率为代价。因此,在实际任务中可根据需求智能切换模式,达到续航与性能的最佳平衡。
▍大脑与小脑:分层智能控制如何实现?
要让这样一个结构新颖、模态可变的机器人稳定自主飞行,离不开强大的控制系统。研究团队为其设计了一套结合非线性模型预测控制(NMPC)与PID控制的双层控制器架构。
上层大脑(NMPC)负责规划。它根据任务要求(如设定的飞行轨迹),在考虑机器人复杂动力学模型和各种约束条件下,在线实时求解优化问题,计算出未来一段时间内所需的理想推力与角速度指令。这种预测控制方法让机器人行动更具前瞻性。
下层小脑(PID控制与分配器)负责执行。PID控制器接收NMPC下发的角速度指令,通过反馈调节计算出实现该姿态变化所需的精确控制力矩。
随后,控制分配器这个关键环节登场。它需要解决一个核心问题:如何将上层计算出的“合力与合力矩”指令,最优地分解并分配给两个推进模块的四个执行器(两个风扇的转速、两个导流片的角度或转速)?
针对两种不同模式,分配器的算法也截然不同。在节能模式中,它求解一个非线性规划问题,找出合适的推力大小和固定导流角。在性能模式中,问题更复杂,需要同时求解风扇开关时机、导流片旋转速度等八个控制变量,以实现对三维空间力和力矩的精准跟踪。
这套分层、分模态的控制体系,确保了FRDP无论在哪种模式下,都能将高层的任务指令,转化为底层执行机构稳定、准确的动作。
▍从仿真到地面实验:小身体有大能量
为了验证FRDP的设计与控制算法的有效性,团队进行了一系列仿真与物理实验。
在仿真模拟环境中,FRDP成功完成了复杂的三维轨迹跟踪任务。数据显示,性能模式的轨迹跟踪精度显著高于节能模式(例如在X方向平均绝对误差从2.94厘米降至0.55厘米),但同时其能耗也更高,印证了“性能-能效”的权衡关系。
在实验室中,研究人员测量了FRDP的真实推力。在节能模式下,其主平面内最大推力可达0.82N;在性能模式下,等效最大推力约为0.21N。据此推算,这台仅0.6公斤的机器人能产生超过1.3m/s²的最大加速度,机动性优于许多现有空间站飞行机器人。
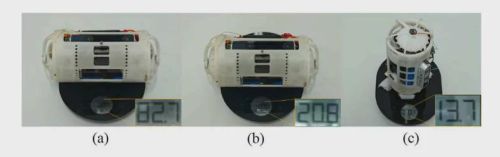 FRDP的推⼒测量结果。(a)节能模式下的主推⼒。(b)性能模式下的主推⼒。(c)横向推⼒
FRDP的推⼒测量结果。(a)节能模式下的主推⼒。(b)性能模式下的主推⼒。(c)横向推⼒
由于难以在地面复现真实微重力环境,团队搭建了一个地基微重力模拟平台。该平台通过水平跟随系统与垂直重力补偿系统,让悬挂的FRDP能在三维空间内近似自由飞行。
在该平台上,FRDP成功演示了环绕物体的飞行动作,验证了其在实际物理系统中的控制能力。尽管存在平台跟踪精度和悬吊系统振荡带来的误差,但实验充分证明了原型机和控制系统的可行性。
 FRDP地⾯轨迹跟踪实验的快照
FRDP地⾯轨迹跟踪实验的快照
从灵巧的双矢量推进结构,到智慧的双模态控制策略,FRDP为未来空间站微型自主机器人提供了一种全新的设计范式。随着后续自主路径规划、多模态智能决策等技术的融入,这样的“空间小飞侠”有望在未来空间站的日常运维、科学实验支持乃至航天员辅助作业中,扮演越来越重要的角色。
论文链接:https://ieeexplore.ieee.org/document/11349688














