《科创板日报》2月1日讯(记者 张洋洋)从特斯拉的Optimus进厂引领人形机器人打工风潮,到机器人引入脑机接口技术辅助进行康复训练,再到上纬启元首款个人机器人Q1,面向科研、创作和家庭用户开放“二次开发”能力,如果说过去几年,人形机器人更多停留在实验室与舞台中央,如今它们的应用边界,正在走向更具连续性“作业”的场景。

上纬启元Q1个人机器人 身高仅80cm 面向科研、创作和家庭用户“二创”需求
市场研究机构IDC数据显示,2025年全球人形机器人市场进入加速期,应用需求主要集中在文娱商演、科研教育、数据采集、导览导购、工业制造与仓储物流等领域。
但随着机器人从样机走向规模化应用,一个绕不开的现实问题也在浮现——数据,正在成为具身智能进一步进化的掣肘。
▍场景在扩张,数据却远未跟上
与自动驾驶、通用大模型类似,具身智能同样高度依赖数据驱动。但与前两者不同的是,机器人所需的数据并不只是看和说,而是在真实物理世界中完成接触、施力、协同与失败的全过程记录。
现实情况是,这类数据极为稀缺。
一方面,真实机器人数据采集成本高、周期长。每一次抓取、插入、搬运、双臂协作,都意味着硬件磨损、人力投入和复杂标注;另一方面,单纯依赖公开视频、仿真数据,又难以反映第一人称视角下的真实操作意图,更无法覆盖触觉、接触力等关键物理维度。
“如果只看视频,机器人永远学不会怎么用力。”上海一位具身智能领域研究人员向《科创板日报》记者直言,这也意味着,在本体性能逐步接近、硬件方案趋同的背景下,谁能率先积累高质量、可泛化的真实交互数据,谁就更有可能在下一阶段掌握模型与生态的话语权。
在这一背景下,围绕数据、接口与标准的协作正在明显增多。近期,上海多家机器人企业与科研机构相继发布或推进数据集建设。
国地中心还联合上海纬钛科技有限公司发布了全球首个大规模跨本体视触觉多模态数据集——白虎-VTouch。该数据集涵盖视触觉传感器数据、RGB-D数据、关节位姿等多模态信息,覆盖轮臂机器人、双足机器人及手持终端等多种本体构型,数据规模超过6万分钟,被业内视为目前全球规模最大、模态最完整的视触觉真实交互数据集之一。
在国家地方共建人形机器人创新中心(下称“国地中心”)训练场,每天都有多台机器人在同时执行多种真实场景作业任务。
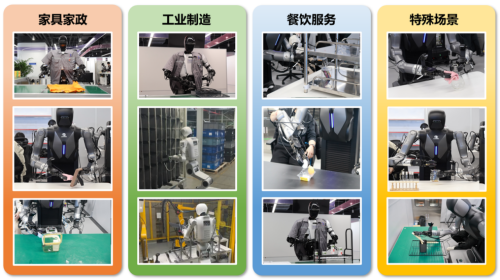
国地中心训练场 典型场景的真机操作
据国地中心介绍,与以往“单任务、人工采集”的方式不同,白虎-VTouch引入了“矩阵式”任务构建思路,从双臂协同结构、原子操作类型、接触与触觉模式三个维度进行系统设计,覆盖家居、工业、餐饮、特种作业等四大类场景、380余种任务类型。
▍“数据不是越大越好”
对于数据的重要性,近期在接受《科创板日报》等媒体采访时,傅利叶CEO顾捷给出了更为克制的判断。
顾捷表示,数据对机器人未来是否具备泛化能力至关重要,这一点在自动驾驶和早期大模型发展中已被反复验证。但他同时强调,数据并非越多越好,质量、结构与来源同样关键。
“一项任务重复执行一千次,甚至一万次,有时并没有太大价值。真正有价值的是在不同任务之间切换,并且包含成功与失败的完整过程。”顾捷指出。
他进一步认为,机器人数据不能只依赖自身采集。互联网上的大量公开视频可以作为基础,但其局限在于缺乏第一人称视角,难以反映人类真实的操作意图。因此,还需要大量基于人类第一视角的人体运动和操作数据,并与机器人在真实环境中采集的本体数据进行融合。
在傅利叶的设想中,理想的数据结构应由三部分构成:公开视频作为大规模基座、第一人称人类交互数据作为核心补充、再叠加小批量但高价值的机器人实采数据。即便后者占比不高,其绝对量级未来也可能达到亿级。

傅利叶GR-3机器人参与手眼康复训练
围绕数据展开的竞争,正在向更底层延伸。
一方面,是多模态传感器、视触觉融合等技术不断成熟,使真实物理交互数据的采集成为可能;另一方面,是数据格式、标注体系与训练标准的协同需求快速上升。
近期,库帕思与它石智航官宣战略合作,明确提出将共同推进具身数据标准建设;傅利叶也联合多家医院、高校与科研机构,发起“脑机具身·数据引擎联合创新计划”,尝试在康复等场景中打通脑机接口与具身智能的数据闭环。