无人机要进化成“飞行手”了!
一个能在空中自主飞行、伸手抓取物品、开门、甚至在树枝上栖息的机器人,刚刚登上国际顶级期刊《自然·通讯》《Nature Communications》。


近日,浙江大学团队研发出一款手型仿生自主飞行机器人HI-ARM,首次将人手的灵巧抓取与无人机的敏捷飞行深度融合,实现了真正意义上的空中操作自由。从抓水瓶、捏纸巾,到开门、栖树、跨河送物,这台仅成人手掌大小的机器人展示出前所未有的空中操控潜力。
01.
不是无人机+机械臂,而是“飞行手”本手
以往空中操作机器人,大多是在无人机下方挂载机械臂,结果往往是笨重、耗电、操作耦合严重,一抓东西整机就晃,精细活根本干不了。
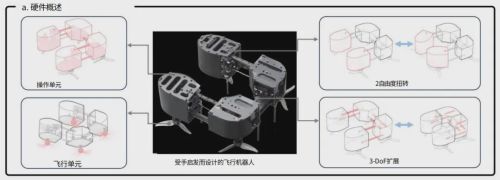
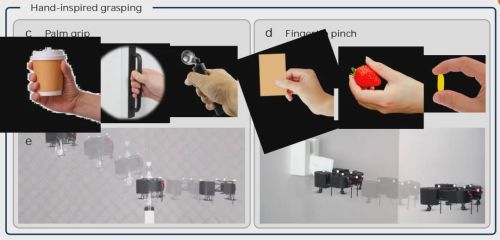
浙大团队这次走了条“基因级创新”的路子:直接模仿人手结构,将人手的灵巧抓取能力与飞行器的敏捷运动能力相融合,打造了HI-ARM。它就像一个“长了旋翼的手掌”,将飞行与抓取功能进行了深度整合。
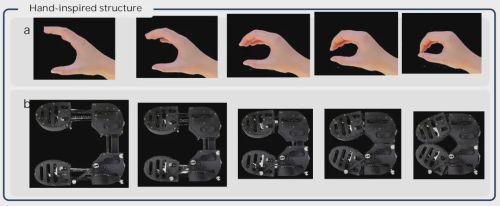
它拥有“手掌”区域,具备“指尖”结构,并采用腱绳驱动机制(仿人手肌腱)驱动所有变形关节。整体仅手掌大小,重量轻,却具备5自由度变形能力,能适应不同形状物体。
更绝的是,它还是一台四旋翼飞行器,继承了无人机敏捷飞行的基因,能在飞行中随时变形抓取,实现边飞边操作。
02.
有“手”还得有“脑”,自主框架让机器人自己思考
光有灵巧的“手“不够,HI-ARM还搭载了一套分层自主框架,包含任务规划、轨迹生成、状态估计与自适应控制。
它支持两种模式:
- 全自主模式:机器人根据任务类型,从动作库中自主组合动作序列,完成抓取、开门、栖息等任务;
- 人机协作模式:根据操作者意图生成指令,实现远程遥操作。
为了解决飞行中抓取带来的模型扰动,比如重心变化、外力干扰,团队研发了多级自适应控制器,能实时估计并补偿外力外扭矩,让机器人在抓取、推门等互动任务中依然保持稳定。
03.
实测现场:从抓水瓶到跨河送货
- 多模式抓取
HI-ARM的能耐,在一系列精心设计的实验中得到了充分验证,其应用场景横跨室内服务与野外作业:
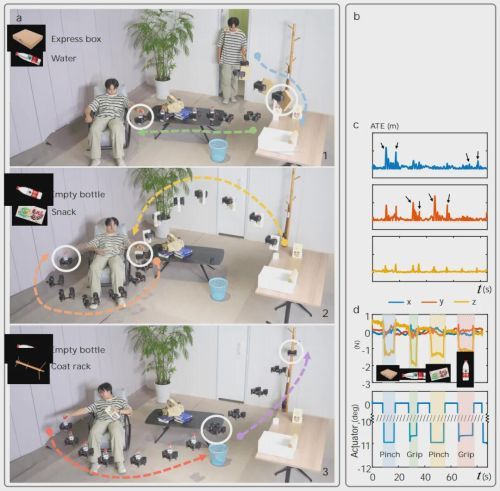
可以自主抓取153g水瓶并运输,最大速度1.1m/s;能精准抓取单张薄纸巾,控制误差<3cm;面对不规则形状物体(如字母积木),自动变形贴合抓握。
- 开门与栖息
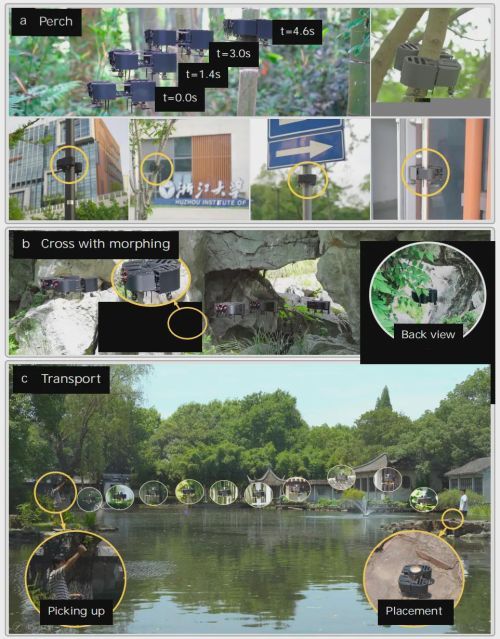
可以自主飞向门把手,抓握并推开房门;能仿鸟类栖息,飞向树干并抓握停靠,电机停转、仅靠摩擦力悬挂,能耗降至悬停的1%以下。

- 连续人机交互
在模拟家居场景中,连续完成“取快递→递水→收零食→扔垃圾→回衣架栖息”一系列任务,全程无需人工干预。
- 野外生存专家
在竹林、电线杆等多种场景成功栖息;可以变形缩窄机身,穿越狭窄洞穴;还能跨河送货:抓取水杯,飞越河流并送达对岸。
- 人类的“第三只飞行手”
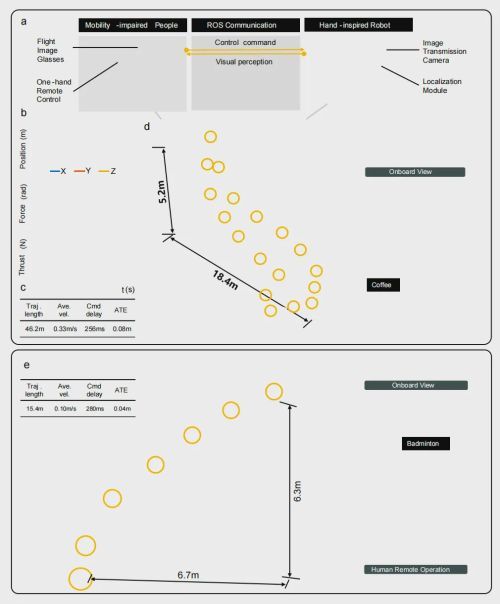
HI-ARM还可作为远程操作终端,帮助行动不便者或普通人在复杂环境中取物。
实验中,行动不便者通过第一视角眼镜遥控HI-ARM,从二楼飞至地面取回咖啡杯,轨迹总长46.2米,稳定完成;还可以模拟羽毛球卡树场景,远程操控机器人飞至树梢,指尖捏取羽毛球并返回。
04.
未来已来:从“飞行眼”到“飞行手”的时代跨越
目前HI-ARM仍需依赖外部定位系统,未来团队计划融合力反馈,实现抓握鸡蛋等脆弱物体;引入多模态基础模型,提升环境认知与任务理解能力;发展HI-ARM集群系统,实现多机协同搬运等复杂任务。
空中机器人正从被动观察走向主动操作,未来在物流配送、家庭服务、野外救援、远程协作等领域极具应用潜力。
也许不久后,你会看到一双“飞行手”帮你开门、递水、送快递,而它,可能正静静栖息在你家的窗帘杆上。
论文链接:http://www.nature.sh.sjuku.top/articles/s41467-026-68967-3