“无绳化、小型化”已成现如今机器人系统进化的主旋律,但一道物理“魔咒”始终横亘在前——尺度效应(Scaling effect)!当机器人尺寸被缩小,其物理输出竟会指数级暴跌。
这意味什么?指甲盖大小的微型机器人,捏碎蛋壳都成奢望。
更残酷的是,现有的无线微型机器人连走路都挑环境!它们只能在气/液介质中如鱼得水,一旦遭遇真实世界的复杂环境却原形毕露:高阻、高摩擦的多相介质,让微型机器人寸步难行!
近日《Science Advances》发布的重磅研究成果给出了解决方案,小小身材的机器人也能“重拳出击”。

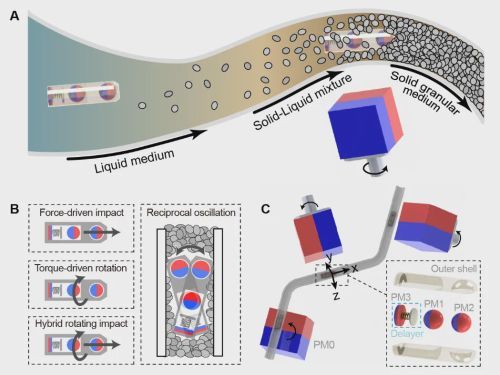
这个名为【RoboIMP】的冲击驱动磁控微型机器人由香港城市大学张甲晨和香港中文大学张立团队合作研发。它仅指头大小,却能持续爆发超过3牛顿冲击力,一举打破磁驱机器人的理论力量极限!
更神奇的是,它通过“振荡流化”策略将环境阻力直降13倍,首次实现微型机器人在固液混合物(如食糜)和颗粒介质(如沙土)中的自由穿行!
01.
泥潭困局?机器人的一记“磁力重拳”!
传统微型机器人在高阻力介质中举步维艰,这一困境揭示了摆在微型机器人系统面前的两座大山:
1.缺乏可持续性的强力输出:传统磁驱机器人力量随尺寸立方级衰减(L³),现有技术靠化学爆炸或相变材料短暂爆发,但均无法重复。
2.缺乏减小环境阻力的运动策略:仅有蛮力是不够的,机器人陷入沙土时,全身被死死“锁住”怎么办?
“小恶魔”RoboIMP有自己的破局之道:
1.往复冲击结构:内置两颗球形磁铁(PM1、PM2)上演“磁力拔河”。主动磁铁PM1在旋转磁场PM0的驱动下反复撞击外壳,将磁势能转化为瞬时冲击动量。强力输出搭配可调整撞击频率!
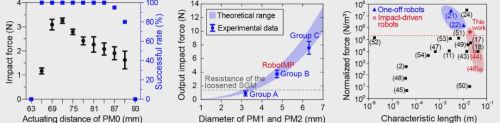
2.延时器黑科技:独创弹簧-磁铁缓冲模块,精准控制撞击时机,让冲击力暴增50%,峰值突破3.26牛顿。
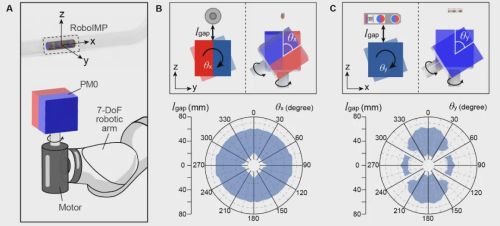
3.计算机辅助远程操作:全程无线操控,纯靠外部磁场供能,控制源至机器人的驱动距离达60毫米,抵近生物腹腔距离。
在单位体积下,RoboIMP的力量超传统无线机器人百倍,直接冲破磁驱机器人的理论极限!令人惊叹的是,如此强力输出还是持续、可逆的。
02.
阻力太大?先给周围介质“松土”!
别以为仅仅只有“大力出奇迹”,RoboIMP的另一个核心杀招是“四两拨千斤”的“流化介质”运动策略。
在真实的应用场景中,机器人面对的是更加复杂的介质环境,例如机械腔道中的污垢和堵塞,工业管道中的颗粒堆积层,消化道中的食糜与消化残渣等。这些环境由多种形态的物质构成,形成高阻、高摩擦的多相介质,让现有的无线微型机器人寸步难行!
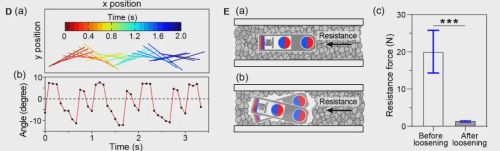
RoboIMP另辟蹊径,当机器人在介质中行进时,通过往复振荡与轴向旋转的复合运动。持续扰动周边颗粒物质,使原本致密固结的沙土瞬间转变为动态液化态。实验证实该技术可令环境阻力骤降13倍,成功将坚硬颗粒介质转化为类液体“可游动”环境。
这一机制深度借鉴了沙鱼蜥在流沙中的穿行智慧,标志着无线微型机器人首次掌握介质流化能力,为穿越固液混合介质等工业与医疗场景带来突破性进展。

03.
“小恶魔”擅长上天遁地
在玉米糊、玻璃珠、沙粒乃至大豆粉等多种高阻介质实验中,RoboIMP均展现出卓越的导航稳定性。
面对玉米糊这类固液混合物,机器人通过冲击-振荡耦合作用在粘稠介质中撕开通道,实现持续突破;
而在玻璃珠/沙粒/大豆粉等颗粒环境中,其旋转-振荡复合运动巧妙松动周边颗粒,构筑出动态低阻腔体——原本致密包裹的介质瞬间趋近高密度摩擦流体,前进阻力呈数量级下降。
这种跨介质自适应能力,标志着机器人真正掌握了在极端异质环境中的自主破障智慧。

即使在垂直向上和90°弯头结构中,机器人依然保持稳定导航。对比数据令人惊讶,与其他有线的机器人相比,无缆的RoboIMP在颗粒介质中表现出更为突出的运动效率,其挖掘效率与自然界的穴居动物(如剃刀蛤)旗鼓相当。

04.
实战验证:从清管道到闯肠道
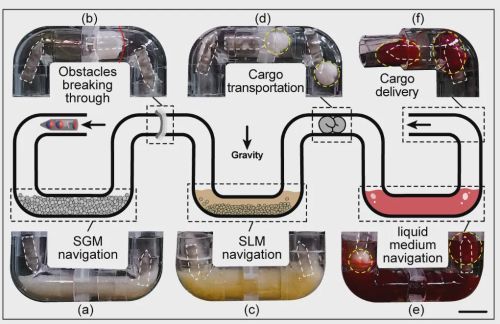
在复杂管道系统实验中,RoboIMP穿越玻璃珠颗粒层、玉米糊固液混合物以及血液环境,并成功完成转弯、垂直攀爬、障碍突破与货物运输任务。
在生物医学验证中,研究团队将内窥成像模块集成于RoboIMP,于离体猪小肠模型内展开测试。实验证明,小恶魔机器人可以搭载内镜模块深入肠道模型,在人工食糜中灵活导航。

面对食糜附着的复杂肠壁环境,机器人通过高频原地振荡有效剥离局部覆盖物,成功获取无遮挡高清组织影像。
这种原位清洁成像能力,为未来实现精准诊疗以及灵活消化道内镜开辟了新路径——在肠道清洁(流质泻药等)不充分的情况下进行有效的肠镜检查。
05.
未来:微型机器人的力量革命
RoboIMP的诞生,彻底打破了微型机器人只能待在“舒适圈”的困境。当洪荒之力从机器人微小身躯中迸发时,我们见证的不仅是技术胜利——更是人类对物理法则的重大突破。
这项突破首次证明:无线微型机器人完全可以在复杂多相介质中实现持续、高效、可控运动。

未来应用版图正加速展开——从工业管道智能巡检、地质沉积物勘测,到体内精准诊疗系统,随着无线成像与通信模块的深度集成,这些微型智能体将在人类难以抵达的极端环境中,实现真正意义上的自主作业。
论文链接:www.science.org/doi/10.1126/sciadv.aea7188