外科手术的终极追求是“精准微创、安全高效”。随着智能医疗与机器人技术的深度融合,手术机器人在微创手术中展现了精准治疗等优势,但随着医生对于更深层次靶向治疗以及术中多任务并行的要求,单一结构的手术机器人已难以应对复杂多任务场景。
针对这一挑战,澳门大学徐青松教授团队联合香港中文大学张立教授团队在顶级综合性、Cell Press合作期刊 《The Innovation》 上发表了重磅综述文章,系统勾勒了“协作集成式手术机器人”的未来蓝图,论文第一作者为新加坡国立大学/澳门大学李政阳博士。协作集成式机器人通过多尺度异构机器人协同操作,可同步执行多功能外科任务。本文聚焦此类机器人的技术挑战与发展路径,以推动其在高水平精准医疗中的应用。该前沿成果不仅系统梳理了这一新兴领域的技术突破与临床应用,更为外科治疗的革新提供了全新思路。


01.
首次定义“协作式集成手术机器人” 全新子类
这篇论文的开创性在于,它首次系统性地提出了“协作式集成手术机器人”这一学术概念,并将其定义为外科机器人的一个全新子类。
它不再是单一工具的延伸,而是一个多机器人系统。这些机器人可以是同构的(像多只相同的机械臂),也可以是异构构造、多尺度的子机器人系统进行协作(例如,子系统一负责切割,子系统尔负责成像,子系统三负责递药)。它们在手术过程中各司其职,又协同动作,共同完成高复杂度的多目标任务。图1概述了协作集成式手术机器人的医学应用部位以及典型的手术机器人系统,其在心血管、消化道、腹腔镜等微创手术领域均得到了广泛应用,同时其发展从1998年的Intuitive公司达芬奇第一代机器人系统问世以来便展现除了巨大潜力,近年来在美国FDA、中国NMPA均有拿证的协作集成式手术机器人出现,并且其特点向多尺度、多功能、多驱动方式进行发展和演进。
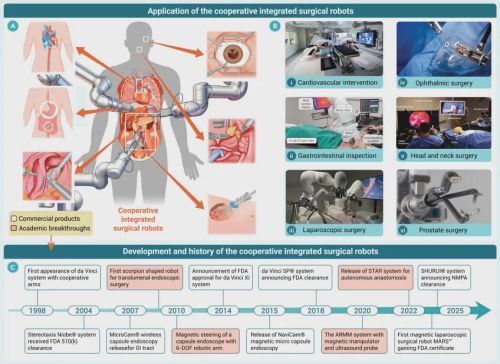 图1. 协作式集成手术机器人的代表性治疗应用与发展历程
图1. 协作式集成手术机器人的代表性治疗应用与发展历程
论文将协作集成式手术机器人的特点和优势概括为四点:
高性能、多功能并重:可整合多尺度、多功能的末端手术工具,同时执行多样手术任务。
卓越的交互式控制:提供高性能人机交互,支持远程多任务操作。
准确定位与可视化:通过外部追踪设备,让医生实时掌握器械位置。
混合驱动功能:在同一系统内使用多种驱动方式(如磁驱动+电机驱动),轻松触及传统器械难以到达的身体区域。
02.
协作集成式手术机器人的关键技术
系统拆解了协作式集成手术机器人的四大核心技术(图2),这也是其实现“精准微创”的关键支撑:
1.多机器人协作系统集成:多自由度机器臂以及其支撑结构可作为构建协作集成式手术机器人系统的基础,这一设计被大量成功的商业手术机器人产品所采用,如达芬奇手术机器人系统等,这些产品已经成功实现了这一多臂结构的稳定运行。在考虑协作集成式手术机器人设计过程时,选择一种驱动方式也至关重要。除了传统的刚性手术机器人外,最近还出现了磁驱动、柔性驱动等多样的新型驱动方式,以完成多用途、多目标的手术任务。
2. 多种功能末端执行器械:多自由度机械臂构成了协作集成式手术机器人的基础框架,而其末端执行器则与专门的手术器械进行集成,能够执行精确的手术操作。由于这些器械直接与患者的生物组织接触,末端执行器械特性的改变还能提升协作集成式手术机器人的操作能力,因此对多功能机器人化器械的合理选择以及提升其功能性能至关重要。
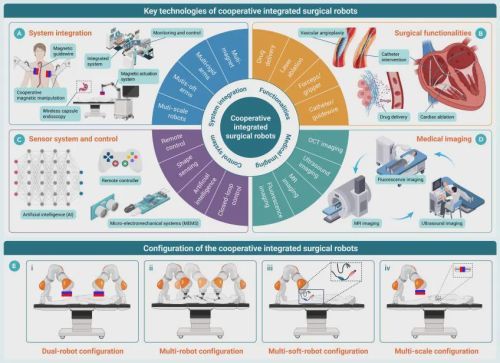 图2.协作集成式手术机器人关键技术示意图
图2.协作集成式手术机器人关键技术示意图
3. 传感器系统与智能控制:协作集成式手术机器人系统包含传感器系统和追踪装置,这些装置对于机器人闭环控制发挥着至关重要的作用,并能将机器人化器械在患者体内的手术位置信息进行术中处理。其特点是在有限的空间内实现多种操作动作。鉴于协作集成式手术机器人主要以完全或半自主的方式运行,并通过基于人工智能的控制方法,外科医生能够在手术过程中通过人机交互方案远程操控机器人器械。
4. 医学成像与导航技术:协作集成式手术机器人需要术前/术中影像引导的辅助,以实现多任务分配。通常,医学影像可分为电离辐射成像和非电离辐射成像两类;值得注意的是,手术机器人可以有效减弱医学影像的辐射影像,同时可以使用影像进行机器人的反馈控制,实时掌握术中器械位置与病灶组织信息,实现到靶点的精确导航。
03.
当手术机器人学会分工:四种协作模式
论文中不仅提出了概念,还对现有技术进行了系统性的梳理和分类,根据手术任务的不同,协作集成式手术机器人发展出了多种“协作”的形态。
1. 协作磁控手术机器人:
这类机器人利用外部磁场控制体内的微型机器人,如图3所示。案例显示,通过多机械臂协同控制永磁铁或电磁线圈,医生可以在体外精准导航毫米级的磁性微导管,在血管系统中进行血栓切除或药物递送,无需开刀,创伤极小。这就像在体外用“磁力线”牵引着体内的微型“潜水艇”去完成精细任务。
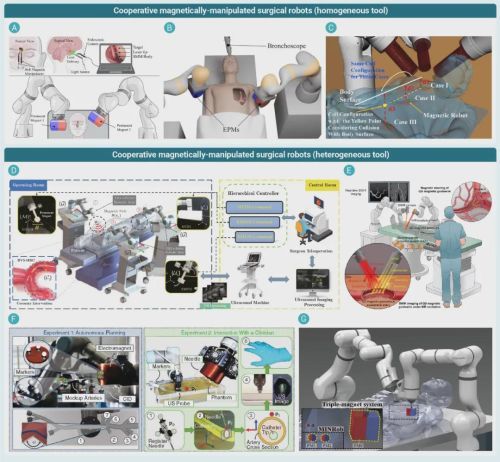 图3. 协作磁控手术机器人
图3. 协作磁控手术机器人
2. 协作刚性器械手术机器人:
这是目前最成熟的类别,以达·芬奇系统为代表。但新一代系统正朝着更高自主性发展。例如STAR(智能组织自主机器人)系统,利用双协作机械臂,配合电动缝合工具和内窥镜,能在腹腔镜下完成自主的肠道吻合术,其缝合效果已媲美资深外科医生,标志着机器人正在承担更复杂、更独立的操作任务。
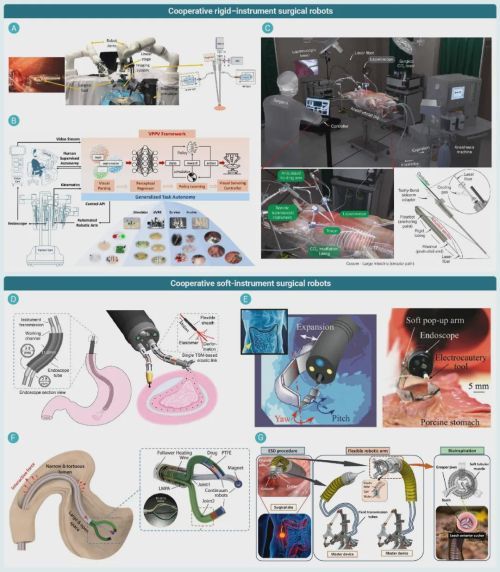 图4. 协作式刚性/软器械手术机器人
图4. 协作式刚性/软器械手术机器人
3. 协作软器械手术机器人:
这类机器人由柔性材料制成,可以像蛇一样弯曲、扭转,在心脏、消化道等复杂腔道内自如穿行。论文重点介绍了达芬奇单端口(SP)系统,它仅通过一个切口,就能伸入多支柔性器械(如微型镊子、显微内镜),完成从前需要多个创口才能实施的手术。它们在狭小空间内的协同能力,是传统刚性器械无法比拟的,如图4所示。
4. 协作多尺度手术机器人:
“宏观+微观”协同,宏观机器人负责导航,微型/纳米机器人深入脑血管、胆囊等狭窄区域,完成血栓取出、药物递送等精细操作,破解传统手术“够不到、做不细”的难题。例如,外部磁控机械臂引导无线的微型胶囊机器人进入胃肠道,进行定点药物释放或活检。大型机器人与微型机器人“大小搭配”,优势互补,将手术的微创化推向了极致,如图5所示。
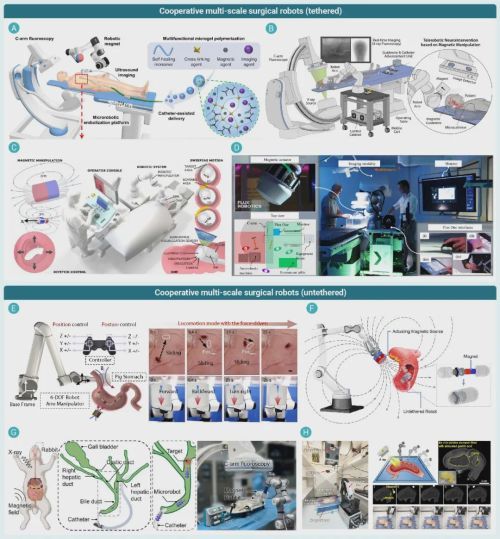 图 5. 协作式多尺度手术机器人
图 5. 协作式多尺度手术机器人
04.
协作集成式手术机器人的发展蓝图: 多学科融合技术路线
协作集成式手术机器人研究属于高度交叉的学科领域,成熟学科与新兴领域均能在该领域发挥重要作用。在术前规划阶段,临床医学为研究提供手术具体流程、人体解剖学知识、外科操作技术及临床诊疗规范等核心输入要素。医学影像学科可通过术前影像扫描技术为手术导航与规划提供技术支撑;病理学科则可实现健康组织与病变组织的精准区分,为协作集成式手术机器人后续的智能组织识别与精准切除操作奠定基础。从材料和机械科学的角度来看,选择具有生物兼容性、重量轻且强度高的材料,能够制造出用于在人体内安全部署的机器人末端执行器。同时,自动控制、人工智能、实时通讯以及感测回馈也是支撑协作集成式手术机器人功能的核心学科领域 (图6)。
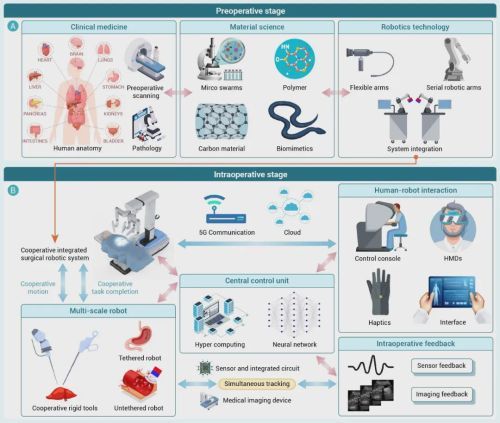 图6. 协作集成式手术机器人的多学科融合技术发展路线
图6. 协作集成式手术机器人的多学科融合技术发展路线
05.
结语
此外,论文也通过大量临床案例,证实了这类机器人的显著优势——直肠癌手术时间从227.5分钟缩短至184分钟,小肠内镜平均读数时间缩短至33.7分钟,心血管干预中血管损伤率大幅降低,真正实现了“微创、精准、高效”,为患者带来更好的治疗体验。
当然,论文也客观指出了当前发展面临的挑战:技术层面,不同驱动方式整合、器械微型化仍是瓶颈;临床转化层面,高成本、医生培训难度大、监管审批严格,限制了其普及;伦理层面,人工智能辅助决策的问责制、机器自主权的边界,仍需进一步明确。
“协作集成式手术机器人”概念的提出,不仅是技术的迭代,更是外科手术理念的一次飞跃。它让我们看到,未来手术室的主角将不再是孤立工具,而是一个由不同专长机器人组成的、在医生智慧指挥下高效协同的“医疗团队”。从宏观到微观,从刚性到柔性,从手动到自主,这些机器人正以互补的姿态,突破人体生理的极限,拓展外科治疗的边界。
参考文章:
https://www.sciencedirect.com/science/article/pii/S2666675826000573