
在变幻莫测的跨介质环境中,无论是干燥陆地、潮湿表面还是完全淹没的水下,实现可靠的抓取与附着一直是暂栖机器人、爬行机器人及复杂表面作业系统面临的长期挑战。
对于这一问题,大自然早已给出了进化的答案。
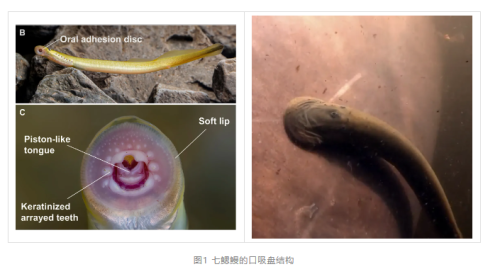
作为地球上最古老的脊椎动物之一,进化超过5亿年的七鳃鳗(Lamprey),凭借其独特的口盘结构,即便在湍急的水流中也能死死吸附在猎物或岩石表面。这种卓越的适应力源于其“负压吸附+机械锁合”的协同策略机制,其中柔软唇缘实现界面密封,肌肉泵产生强负压,环绕分布的角质齿则与复杂表面形成物理互锁。
然而,现有的仿生吸附系统往往陷入“单打独斗”的局限:受壁虎启发的干粘附在水下会因水膜干扰失效,受章鱼启发的吸盘在面对粗糙多孔表面时则因无法密封而无计可施。
针对这一行业痛点,北京大学喻俊志教授团队受七鳃鳗口吸盘启发,研制出一种新型混合粘附吸盘。该设计创新性地集成了温控变刚度形状记忆聚合物(SMP)阵列与柔性硅胶唇圈,成功打破了两栖环境与表面粗糙度的双重性能壁垒,为新一代两栖机器人的自适应抓取开辟了全新路径。
01.
科学问题:复杂两栖界面上,负压吸附与机械锁合如何协同作用,以突破粗糙表面密封受限的附着瓶颈,实现稳定、可逆的普适吸附?
针对这一问题,喻俊志教授团队受七鳃鳗口吸盘形貌与功能启发,揭示了“负压吸附+机械锁合”的协同机理,在Science合作期刊《Cyborg and Bionic Systems》上发表了题为“Lamprey-Inspired Amphibious Suction Disc with Hybrid Adhesion Mechanism”的研究论文。
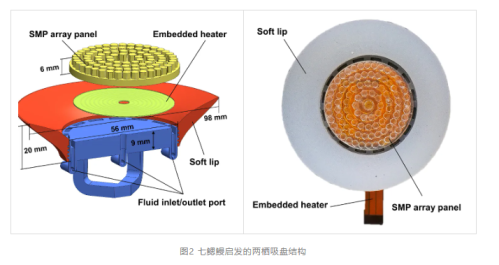
受七鳃鳗口吸盘中角质齿、肌肉泵与柔软周缘协同工作的启发,研究团队创造性地设计了一种SMP吸附面板与柔性唇圈密封的混合粘附吸盘。该吸盘直径98mm,重量仅为70g。为了实现类似七鳃鳗般稳固的吸附,该吸盘的工作流程展示了“刚”与“柔”的完美衔接。
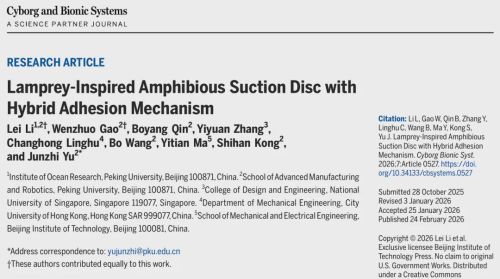
首先,内置的柔性加热器迅速工作,将SMP阵列面板加热至玻璃化转变温度以上,使其由坚硬的玻璃态转变为极具顺应性的橡胶态。随后,吸盘与目标表面接触,柔软的硅胶唇边受压变形并紧贴表面,形成可靠的流体密封。紧接着,内部真空系统开始工作,排出腔室内流体的同时产生负压,这股压力不仅提供了初始的吸附力,更将处于橡胶态的SMP阵列紧紧压入表面的微观凹缝与不规则结构中,精准完成“形貌拓印”。随着加热停止,SMP在环境中逐渐冷却并重新硬化进入玻璃态,从而将先前拓印的几何形貌物理锁定,与表面的微观凸起形成稳固的机械锁合。
这种设计使得吸盘的粘附强度得到了极大增强,且成功实现了吸附强度与持续真空维持之间的脱钩,即使在外部真空失效后,依靠机械锁合的SMP依然能维持长时间的稳固附着。当需要脱离表面时,系统再次启动加热使SMP变软以释放锁合,并同时向腔室内充入流体打破密封,从而实现快速、无损且可控的脱附与复位。
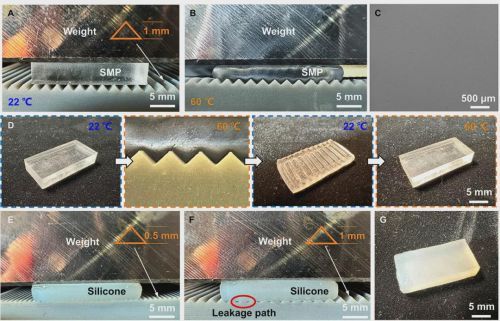 图4 温控形状记忆聚合物(SMP)和硅胶作用示意图
图4 温控形状记忆聚合物(SMP)和硅胶作用示意图
 图5 SMP材料工作原理
图5 SMP材料工作原理
02.
性能验证:吸附力的突破与全地形自适应
空气与水下的粘附性能实验结果表明,该仿生吸盘在性能上实现了跨越式的突破。在光滑表面上,该吸盘在空气中产生的最大吸附力可达562.6 N,而在水下则表现出更优的性能,吸附力进一步提升至590.7 N。这意味着这个重量仅为70 g的小巧装置,能够吊起超过其自身重量850倍的重物。
更为关键的是,该研究打破了传统吸盘在粗糙表面性能断崖式下跌的魔咒。在表面粗糙度Ra达到707 µm的工况下,传统真空吸盘往往因漏气产生泄漏路径而彻底失效,而本研究的混合吸盘依然能保持稳固粘附。量化对比显示,SMP层的引入使吸盘在空气和水下的粘附力较纯负压模式分别提升了377%和270%。
在耐久性方面,得益于SMP的形貌锁合效应,吸盘在空气中承受5N负载时的粘附时间长达26.8小时,相比无SMP的对照组提升了近195%。而在水下环境,其保持时长的提升幅度可达到540%。
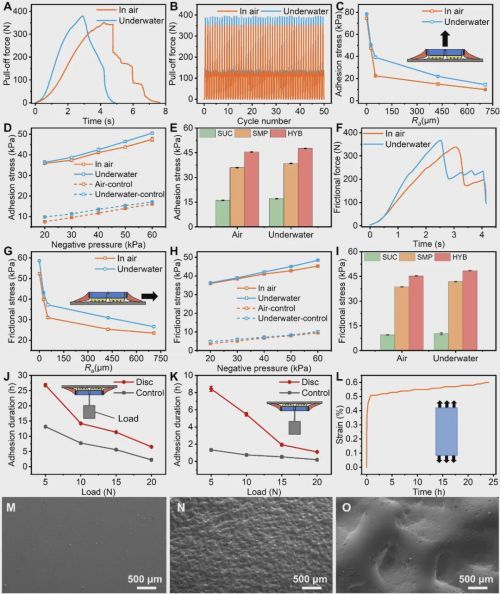 图6 仿生吸盘性能测试与表征
图6 仿生吸盘性能测试与表征
03.
应用演示:跨越介质的“全能抓手”
为了进一步验证这种混合粘附机制的系统级功能,研究团队通过一系列挑战性的实验演示,展示了该吸盘在真实作业环境中的自适应能力。
在空气中,该吸盘表现出了极宽的作业跨度,能够稳固抓取质量跨越6个数量级的物体。无论是仅重0.01 g的电子芯片、形状规则的笔记本电脑(1.1 kg),还是重达11.4 kg的木质桌面,吸盘均能游刃有余地完成任务。此外,它还完美兼容了平整、粗糙、弯曲及不规则的各种几何表面,如电路板、水杯、甚至是结构复杂的扳手和铁锤。
在水下环境中,这种适应性同样出色。吸盘不仅能吸附光滑的金属钱币,还能在红砖、扇贝壳、大海螺等具有自然孔隙或复杂曲线的物体上维持稳定抓取。
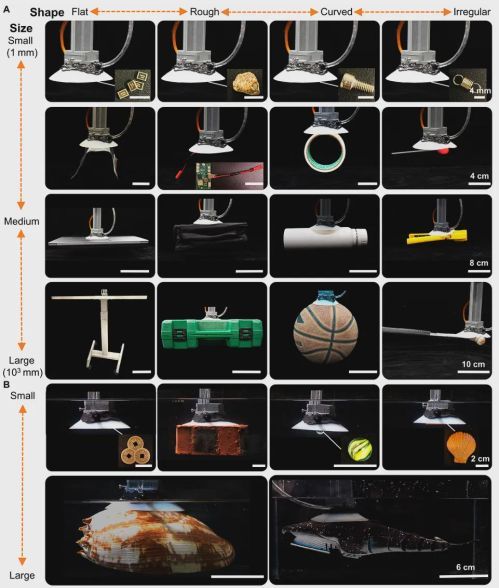 图7 仿生吸盘抓取性能展示
图7 仿生吸盘抓取性能展示
最令人印象深刻的演示是该吸盘与机械臂集成的跨介质操作。
在实验中,机械臂携带仿生吸盘,在空气中精准抓取了一台仿生蝠鲼机器人,并将其平稳地放入水中;机器人游过一圈后,吸盘在水下再次发力,将机器人从水中稳稳提回空气中。这一过程充分证明了吸盘在空气与水界面转换时的极高可靠性。实验记录的压力与温度曲线显示,SMP的相变与负压系统协同工作,为跨介质的动态过程提供了持续且稳定的粘附力。通过与现有的仿生吸附系统进行横向基准测试,该混合吸盘在粘附应力和摩擦应力方面均展现出了显著的优势。尤其在处理具有挑战性的表面和长效负载附着时,其表现超越了大多数单一机制的仿生设计。
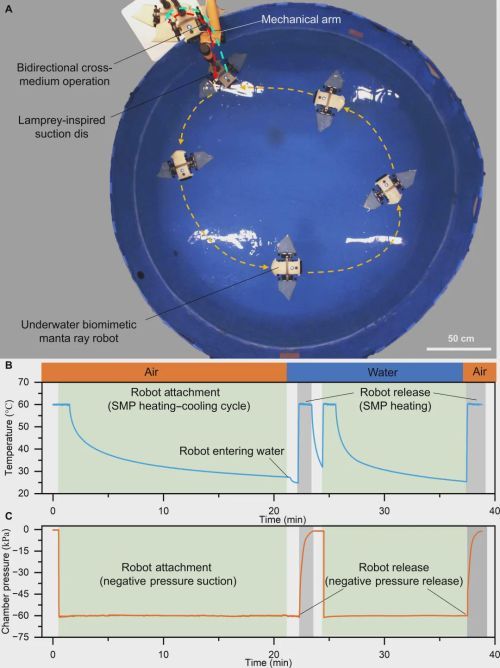 图8 蝠鲼机器人跨介质抓取展示
图8 蝠鲼机器人跨介质抓取展示
该论文的第一作者为北京大学先进制造与机器人学院特聘副研究员李磊和硕士研究生高文卓。北京大学先进制造与机器人学院喻俊志教授为通讯作者。
合作者包括北京大学先进制造与机器人学院博士研究生秦博扬、王博、助理研究员孔诗涵,新加坡国立大学设计与工程学院博士研究生张以远,香港城市大学校长助理教授令狐昌鸿,北京理工大学机电学院马艺甜等。
相关研究得到了国家自然科学基金、北京市科技新星计划、河北省自然科学基金、国家资助博士后研究人员计划及中国博士后科学基金等的联合资助。
论文链接:https://doi.org/10.34133/cbsystems.0527