总重只有1.15公斤、0.2秒可充气、髋关节能多得到13.5%-18.7%的额外助力。这不是健身黑科技,而是一台能穿在身上的软体外骨骼。

全球老龄化正在加速,到2050年,65岁以上人口将占总人口的16%。走路,这件年轻人觉得理所当然的事,对很多老人来说却成了一种挣扎。双腿发软、关节僵硬、上个台阶要扶墙,走不了多远就得坐下歇一歇。
传统的刚性外骨骼太沉、太僵、太像把人塞进机器人里。于是,中国科研团队换了个思路,不做钢铁侠,改做软肌肉。他们把TPU织物做成气囊,排成一列,充气后互相挤压、弯曲,像一组充气的“肌肉束”一样,推着大腿向前迈步,辅助走路,
这项研究于近日发表在人机系统领域顶刊《IEEE Transactions on Human-Machine Systems》上,由浙江工业大学牵头,联合中国计量大学、哈萨克斯坦纳扎尔巴耶夫大学、澳大利亚堪培拉大学共同完成。
01.
刚性外骨骼的尴尬:绑着铁架子走路
先说说现有的刚性外骨骼。这类设备看起来很科幻,金属关节、电机驱动、绑在腿上,像《流浪地球》里的外骨骼装甲。
但实际用起来,还有很多缺陷。
首先就是重量问题,太沉。设备本身好几公斤,老人本来就腿软,再拖个铁架子,更累。其次就是关节对不齐。机器关节和人体关节很难完美重合,走路时别扭不说,还可能伤到膝盖。还有自由度少的问题。只能做几个固定动作,老人想自然摆腿,有点难实现。
说白了,刚性外骨骼更像把老人塞进一台机器,而不是给老人一双更舒服的腿。于是,研究团队把目光投向了软体机器人。他们选择用柔性材料做执行器,像肌肉一样柔软、轻便、贴合身体。
02.
软体外骨骼的核心:气囊阵列如何变成“助力肌肉”
研究团队设计的核心部件,叫软体阵列执行器。通俗讲,就是一组用织物气囊拼成的“肌肉束”。
原理很直观,用TPU(热塑性聚氨酯)织物做成一个个小气囊,排成一列,固定在一条不可膨胀的基底上。
气囊分两种。一种是条形气囊,充气后会膨胀成圆柱形,像一根根香肠,相邻气囊膨胀时会互相挤压,产生推力。一种是L形气囊:放在两端,起支撑和定位作用,保证推力方向一致。
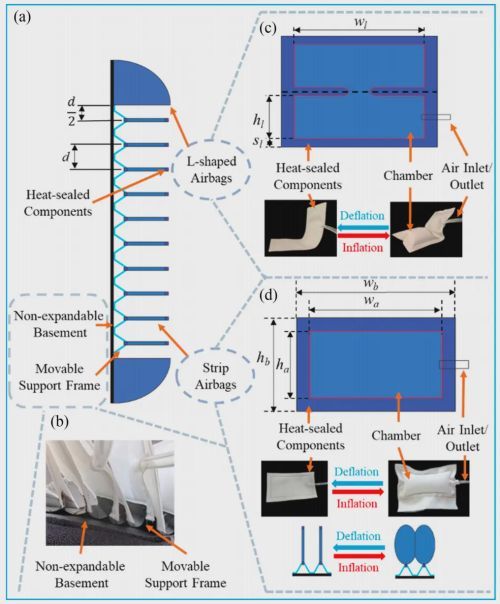
软阵列执行器的机构与工作原理。(a) 软阵列执行器示意图。(b) 软阵列执行器原型装置。(c) L形气囊示意图及样品原型装置。(d) 条状气囊的示意图、样品原型及工作原理。
当所有气囊充气,它们会像多米诺骨牌一样依次膨胀、互相推挤,最终让整个执行器弯曲,并把弯曲的力传递到末端,也就是老人大腿的位置。简单说,就是充气→气囊膨胀→阵列弯曲→推动大腿的过程。
而且,这些气囊是织物做的,没充气时软塌塌一片,可以折叠、卷起来,像一件衣服。充气后又能撑出足够的力量。
最关键的是,整台软体外骨骼没有任何刚性零件。这意味着穿在身上几乎感觉不到异物感,甚至能藏在日常裤子里。
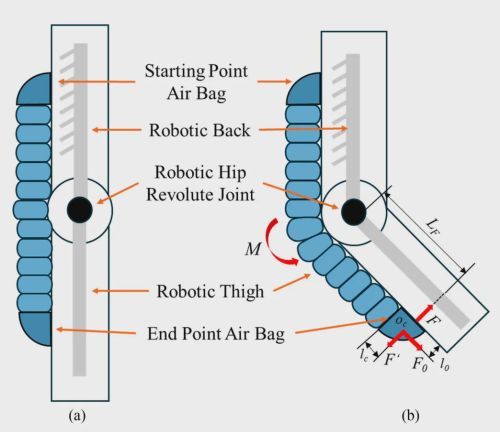
软阵列执行器运行过程中的受力分析。(a) 人体及大腿节段与软阵列 执行器的运动学示意图。(b) 执行器在辅助大腿运动时的受力分析
03.
数据说话:0.2秒充气,输出力超50牛
光说原理不够,实测数据也很理想。
研究团队同步研发完成该软阵列执行器的原型装置,由软阵列执行器、束带、绑带及紧身裤组成。组件均采用弹性亲肤纤维制成,可有效降低因过紧或过敏导致的不适风险。这些部件通过魔术贴固定在不可膨胀基座上,适用于不同体型的穿戴者。由于设计中未采用刚性构件,这款软体机器人外骨骼的总重量仅约1.15公斤。
他们这个原型机做了大量实验,结果相当亮眼:
充放气速度:对执行器在不同气压下的阶跃响应进行测试,发现从5kPa到100kPa工作气压,只需0.2秒;完全放气也只要0.48秒。这个响应速度完全跟得上老人慢速步态,不会机器人卡顿。
输出力:把原型装置佩戴在人形体模型上,在100kPa气压下,末端能产生53.7–55.7牛顿的推力,相当于帮老人省掉了5.5公斤重的感觉。
助力扭矩:作用到髋关节运动,以上推动力能提供8.1-11.2N·m的额外扭矩。这个扭矩是什么概念?研究团队测量了自然步态下老年人髋关节的最大扭矩(约60N·m),他们的软体外骨骼能提供13.5%–18.7%的补充助力。相较于人体髋关节最大扭矩10%的要求,超额完成任务。
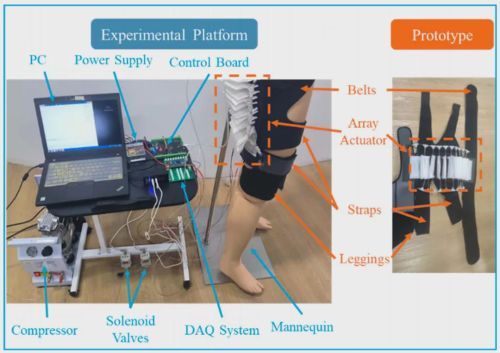 机械性能测试平台及配备软阵列执行器的机器人外骨骼原型装置
机械性能测试平台及配备软阵列执行器的机器人外骨骼原型装置
而且,他们建立了完整的理论模型。运动学、接触力、输出扭矩、动力学,全都用公式推导了一遍,然后和实验结果对比,吻合度很高。这说明这套软体外骨骼的行为是可预测、可控的。
现在整体通过一组对比数据,可以直接看到它比传统外骨骼强在哪?

重量轻、穿着舒服、助力不打折,可更加有力为行动不便的老年人提供持续稳定的步态辅助。
04.
现在还差什么?
当然,这篇论文也诚实交代了当前局限。
首先是气源问题,实验用的是外接空气压缩机,又大又吵。未来会集成一个2.5公斤的微型气泵,别在腰带上。
其次是控制非线性,由于TPU材料本身有弹性滞后,输出力不是完美的线性关系。团队打算用非线性模型预测控制(NMPC)来搞定。
再就是还没真人测试。目前用的是人腿模型,下一步需要招募老年志愿者,在真实步态中验证效果。
另外,他们计划加入传感器和实时步态识别算法,让气囊在人抬腿的恰当时机充气助力,而不是瞎帮忙。
05.
结语
随着老龄化社会的加速到来,让老人能走、敢走、愿意走,不仅是医疗问题,更是尊严保护问题。这台软体外骨骼,不是什么惊天动地的科幻大发明,但它的思路很对,不把老人塞进机器,而是把机器变得像衣服一样柔软。
穿上它,老人不会觉得自己“残疾了需要辅助”,而是觉得“腿上有劲儿了,走路不累了”,这是机器人发展更高阶的形态。
论文链接:https://ieeexplore.ieee.org/document/11466393/authors#authors