人形机器人走向实用,最难的从来不是 “能走”,而是走得稳、学得快、能从仿真顺利落地现实。丰田未来创生中心,正用一套全新的强化学习 + Sim2Real 路线,让旗下 CUE 篮球机器人实现行走、站立乃至运球。尽管CUE目前还不具备行走能力,但通过这套技术路线,有望把双足控制与动态交互能力推到新高度。
 左侧:森田光典。右侧:伊藤贵弘
左侧:森田光典。右侧:伊藤贵弘
近日,丰田官方采访了 R-Frontier 部门的伊藤贵弘、森田光典两位研发人员,披露了CUE人形机器人的最新进展。
伊藤贵弘现任丰田 R-Frontier 人形机器人团队运动控制 / 全身动力学核心工程师、研究员,主攻双足行走稳定、力矩控制与 MPC 模型预测控制,参与 T-HR3 及下一代人形平台研发。加入丰田仅一年多,便成为运动控制方向核心研究者。
森田光典同为该团队研究员,主攻机器人学习、行为生成与模仿学习,擅长从人类示范和大规模数据中学习通用操作技能,聚焦人形机器人手眼协调与灵巧操作。
01.
强化学习+Sim2Real:丰田机器人的动作训练底层逻辑
伊藤贵弘认为,人形机器人要自主掌握复杂动作,强化学习是当下最有效的路径。
它和监督学习不同,不需要大量标注好的完美轨迹,本质是让 AI 在环境里不断试错,根据奖励机制调整行为,最终收敛到最优策略。
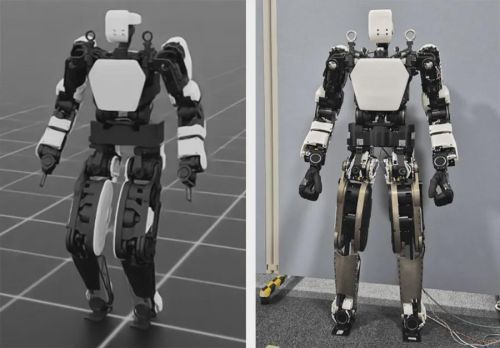 实验中使用的测试机的模拟环境(左图)用于虚拟仿真训练。使用实际设备(右图)进行评估。
实验中使用的测试机的模拟环境(左图)用于虚拟仿真训练。使用实际设备(右图)进行评估。
而让这套方案真正具备工程价值的,是 Sim2Real(仿真到现实)。先在虚拟环境里让机器人跑完海量场景与极端工况,再把训练好的模型迁移到实体机器人上。这能大幅减少真机损耗、缩短训练周期,也是目前全球人形机器人落地的主流技术路线。
丰田的思路和国内头部人形机器人企业基本一致:用仿真补足数据不足,再靠产品迭代解决仿真偏差问题。
02.
走路这件事:仿真1-2小时学会,真机磨了无数轮
行走是人形机器人的基本功,却是工程上的老大难。丰田团队把强化学习完整嵌入行走控制。
他们在仿真里设置了很简单的奖励规则:朝着目标速度走就加分,滑倒、失衡就扣分。为了加快训练,团队直接在仿真中并行跑上千个机器人实例,同步学习、同步迭代。
测试结果显示,只用 1–2 小时,虚拟机器人就学会了前进、后退、转弯,能维持基本平衡。
但模型一搬到真机上,问题就立刻暴露出来。
森田光典坦言,仿真和现实之间存在一道很难跨越的鸿沟:同样的控制指令,虚拟里流畅自然,真机上却会抖动、拖脚,甚至突然失稳。这也是行业普遍头疼的 “仿真-现实差距”。
为了填平差距,丰田研究团队同时用了两套技术方案。
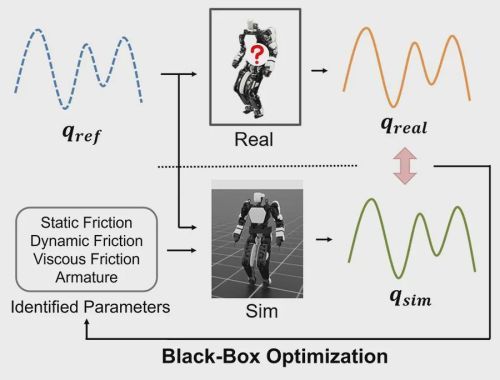 Real2Sim:优化模拟器的执行器模型,使其与真实世界数据相匹配。
Real2Sim:优化模拟器的执行器模型,使其与真实世界数据相匹配。
第一套是域随机化:人为给编码器、IMU 等传感器加噪声,随机改变地面摩擦力,让机器人在 “不完美环境” 里训练,提升策略鲁棒性。
第二套更硬核:Real2Sim 实物反哺仿真。用真机关节电机的实际运行数据,反向校准仿真模型。静摩擦、动摩擦、粘性摩擦、转动惯量,全都通过黑箱优化一一匹配,让虚拟执行器的行为无限贴近真实硬件。
即便这样,真机验证仍是漫长的循环。

每训一个新模型,都必须上真机测试。走不稳,就分析问题、改奖励、重训,再放回真机验证。一圈圈迭代下来,原型机才真正实现稳定行走,甚至被推动时也能稳住姿态不摔倒。
03.
比走路更难的运球:时机转瞬即逝,奖励根本没法手工调
如果说行走只是控制机器人自身,运球还要同时兼顾动态球体,难度直接上了一个台阶。
研发这项技术,主要是为丰田的 AI 篮球机器人 CUE 做铺垫。CUE 最早由丰田工程师志愿者发起,后来归入 R‑Frontier 部门,是一款专用投篮机器人,主打高精度投射技术验证,并非通用服务型机器人。它和 T‑HR3 及下一代人形平台共用底层运动控制技术,但定位不同。项目始于 2017 年,灵感来自《灌篮高手》,现已迭代到 CUE6。

CUE 身高约 2.08 米,依靠全身动力学、力矩控制、MPC 模型预测控制和 AI 视觉感知,实现篮筐定位、弹道计算与实时姿态修正,能完成罚球、三分甚至超远投篮。凭借稳定的闭环控制,CUE 已拿下两项吉尼斯纪录:连续罚球 2020 次命中、24.55 米超远投篮命中。

伊藤贵弘说,运球和行走的控制逻辑完全不一样。行走时双脚支撑的时机相对宽松,可运球时触球只有一瞬间,时机稍差就失败。球一直在动,不会等机器人,对感知、预判和控制精度要求极高。
团队最先卡在奖励函数设计上。森田光典表示,行走的奖励机制有很多成熟参考,很好定义;但运球要控制球速、方向、持续接触,手工设计奖励不仅费劲,还容易让动作僵硬不自然。人工反复调参,效率低、容错也差。
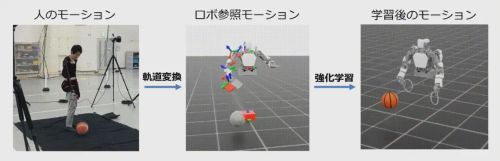
他们最终放弃手工设计奖励,改用模仿人类运动的思路。团队用动作捕捉记录人类自然运球的全过程,把关节角度、运动速度等数据映射到机器人的骨骼结构和运动范围,以人类动作为参考目标。机器人动作越接近,奖励越高。
这种方式不用设计复杂指标,还能直接从人体数据里拿到精准触球时机,让机器人在正确时间击球。最终训练出的运球动作流畅、接近人类,还能在真机上稳定复现。
04.
Sim2Real 运球再遇坎:视觉识别误差险些毁掉全部训练
运球环节,仿真到现实的迁移又遇到了新问题。
在仿真里,系统能直接拿到球的精准位置和速度;但现实中,机器人只能靠头部摄像头加识别算法去估算。误差、延迟都会严重影响动作,导致仿真里完美的策略,一上真机就失灵。

团队没有死磕算法优化,而是选择把现实误差直接搬进仿真。
他们用动作捕捉测出真实环境里视觉识别的误差和延迟,把这些特性写进仿真的观测模型,让虚拟训练环境和现实保持一致。这一调整后,运球动作终于成功从仿真迁移到真机。
05.
未来规划:先落地 CUE,再打造通用机器人框架
对于后续计划,伊藤贵弘表示,近期目标就是把行走和运球能力迁移到 CUE 篮球机器人上。先把整套学习框架部署到 CUE,实现稳定运球,再逐步提升动作的流畅度与观赏性,接近人类篮球运动员的表现。
森田光典则看得更远并表示:团队会聚焦通用人形机器人控制框架,不只依赖强化学习,而是融合多种技术,打造能像人一样应对多样任务、适应复杂环境的通用平台。