

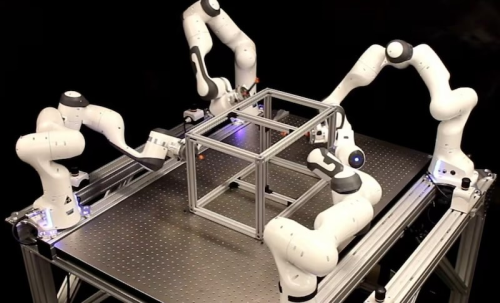
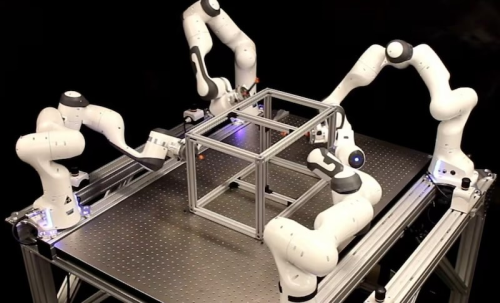
伦敦大学多机器人运动规划新方法登《Science Robotics》
2025年09月05日 14:40
本文共计253个字,预计阅读时长1分钟。
来源/机器人大讲堂
责编/爱力方
声明:本文来自机器人大讲堂,版权归作者所有。文章内容仅代表作者独立观点,不代表A³·爱力方立场,转载目的在于传递更多信息。如有侵权,请联系 copyright#agent.ren。














