


眼科手术,是对人类医生最具挑战性的外科手术之一。
想象一下,在极其有限的操作空间内,医生需要将直径仅60微米(比头发丝更细)的针头,精准插入厚度仅有约25微米的视网膜特定层中。任何轻微的手抖,都可能造成不可逆的视力损伤。
现在,这个难题有了新的解决方案。
中国科学院自动化研究所多模态人工智能系统全国重点实验室边桂彬研究员团队,近日在国际顶级期刊《科学•机器人》(Science Robotics)上发表题为"Autonomous robotic intraocular surgery for targeted retinal injections"的研究论文。
他们研发的自主显微眼科手术机器人系统ARISE,在整个眼内空间实现了自主的视网膜下和血管内注射。实验结果令人瞩目:在眼球假体、离体猪眼球及活体动物眼球实验中,该系统均实现了100%的注射成功率,平均定位误差比医生手动手术减少了79.87%,比医生主从操作机器人手术减少了54.61%
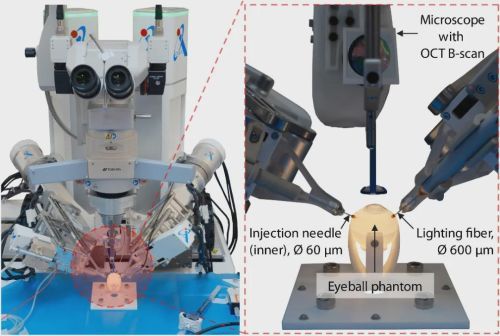
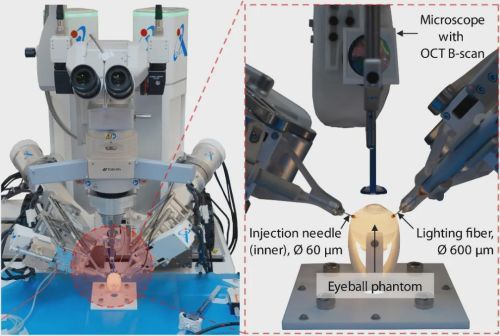 图1 显微眼科机器人ARISE进行自主视网膜手术示意
图1 显微眼科机器人ARISE进行自主视网膜手术示意
这意味着什么?人类获取外界信息的80%以上来自眼睛,而全球已有超过22亿人患有眼科疾病。这套自主机器人系统能够提高手术精确性、安全性和一致性,最大限度减少医源性损伤,有望减轻外科医生工作负担,让医生更专注于手术设计和监督。
▍多模态融合技术突破眼内感知难题
边桂彬研究员团队的核心突破在于构建了强大的综合导航模块
研究团队提出了多视角空间融合方法,专门克服多模态眼内成像中的成像异质性和动态空间失准问题。该系统整合了术前OCT和眼底彩色图像、ARISE的执行器状态、术中OCT A扫描和B扫描、术中显微镜视图以及外部解剖标志或器械的光学追踪等多源数据。
通过这种多视角空间融合,系统构建了一个术中动态更新的全局三维地图。根据实验数据,这张地图在显微镜视野内实现了4.7微米的横向分辨率,视野外为20微米;深度分辨率达到6微米,对真实视网膜深度的复现准确率达到99.08%
在精准定位方面,团队提出了基于准则加权的多传感器数据融合方法。该方法采用三个层级的定位策略:在显微镜视野外,通过RCM辅助的外部空间定位算法融合光学追踪和机器人运动学,实现100微米精度的定位;在眼球后段,末端执行器定位算法分析轮廓和阴影特征,达到亚10微米精度;在视网膜附近,基于术中OCT的相对定位算法分析A扫描数据,实现微米级精准定位
此外,团队还开发了多约束目标优化方法,综合考虑RCM约束、显微镜视野、照明几何、软组织边界保护等多重因素,精确规划机器人末端执行器的轨迹。整个手术过程都在人监督下的力-位置-影像混合控制下进行,确保了手术的安全性。
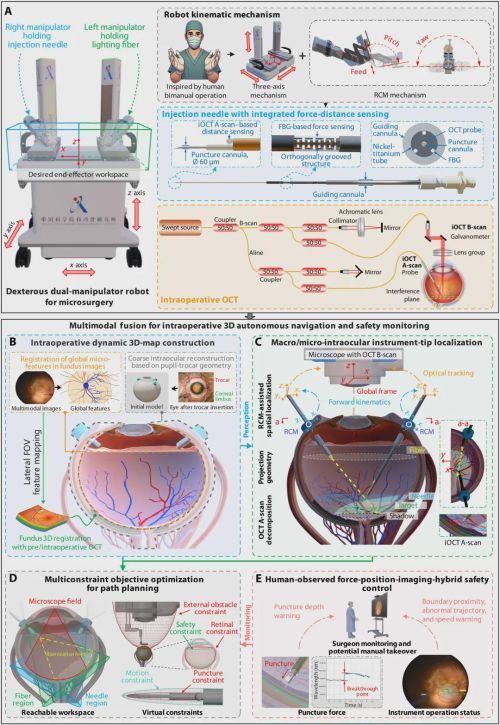 图2 自主显微眼科手术机器人系统ARISE的组成部分
图2 自主显微眼科手术机器人系统ARISE的组成部分
 图3 自主显微眼科手术机器人系统的动物实验结果
图3 自主显微眼科手术机器人系统的动物实验结果
▍推动眼科手术向智能化转型
ARISE展现出显著的性能优势。与人类医生对比,自主机器人的平均定位误差仅为11.71微米,而远程操控机器人为25.80微米,人类医生手动操作达到58.17微米。
特别是在极具挑战性的分支视网膜静脉注射中,由于血管直径更细,人类医生的成功率明显下降,而ARISE依然保持100%成功率
时间效率方面,自主机器人从目标定位到注射完成平均仅需要79.16秒。更重要的是,机器人能够持续提供稳定、精准的操作,不会因为疲劳或压力而影响表现
该研究成果为眼内手术的自主化提供了全新的技术路径,展示了自主机器人在显微手术中的可行性,有望推动眼科手术治疗的进步,尤其在远程医疗和极端环境下具有广阔的应用前景。
减少对稀缺医疗资源的依赖,到缩短外科医生学习曲线,再到提高手术一致性和患者安全,ARISE代表着眼科手术向智能化、精准化方向发展的重要一步。随着技术不断成熟和临床验证的推进,自主手术机器人有望为更多眼疾患者带来高质量的治疗选择。
这项研究由边桂彬研究员(唯一通讯作者)和邓雅文博士生(共同第一作者)等人共同完成,得到了国家自然科学基金、国家重点研发计划、北京市自然科学基金和中国科学院青年创新促进会优秀会员等多项基金支持。
 图4 显微眼科机器人主要研究人员从左至右依次为:付攀博士生、叶强助理研究员、边桂彬研究员、翟宇鹏博士生、李桢副研究员、邓雅文博士生
图4 显微眼科机器人主要研究人员从左至右依次为:付攀博士生、叶强助理研究员、边桂彬研究员、翟宇鹏博士生、李桢副研究员、邓雅文博士生
论文链接:https://www.science.org/doi/10.1126/scirobotics.adx7359












