
爬壁机器人早不是什么新产物。
建筑物、储罐、桥梁、盾构机.....这些垂直表面场景的检测和维护需求一直在涨,把机器人挂上去干活,替代人爬高下低,已经是明确的行业趋势。
但问题在于,磁吸附的、真空吸盘的、仿生爪刺的,无论硬体还是软体,都还有个坎没过。
硬体机器人的问题很直接:身子太硬。焊缝、加强筋、直角拐弯,碰上就卡壳。
软体机器人确实解决了“硬”的问题,材料柔软、能变形,适应性更强。但他们的承载能力有限,负载稍大就变形;控制精度难做,想让它弯到某个具体角度,得花不少功夫。
最近,西南科技大学制造科学与工程学院臧红彬教授团队在软体机器人领域国际知名期刊《Soft Robotics》上发表的一项研究成果“A Collaborative Flipping Continuum Wall-Climbing Robot with Integrated Drive and Function”,给出了一种不一样的解法:连续体结构。
西南科技大学机械专业2023级硕士研究生谌业辉为论文第一作者,臧红彬教授为论文通讯作者。该研究为提升爬壁机器人在大型关键设备复杂钢结构表面多模态运动及其受限环境下运维作业提供了新的解决方案,具有重要学术价值和工程应用潜力。相关研究得到四川省科技厅高新领域重点研发计划项目和西南科技大学研究生创新基金资助项目的支持。
这个机器人用一串刚性关节模块串联而成,靠腱绳驱动,最大能弯387°。它能实时调节翻转步幅,狭窄空间里把自己“折”起来,空旷地带把步子迈大。垂直壁面承载520克(约自重),还能多机协同作业。

01.
模仿象鼻子:关节串联设计,躯干能弯387度
大象的鼻子能卷起一棵树,也能捡起一粒花生米,秘诀就在于其柔软无比的连续体结构。研究团队从中汲取灵感,把机器人的躯干做成象鼻子。
于是,一款【翻转连续体爬壁机器人】诞生了。
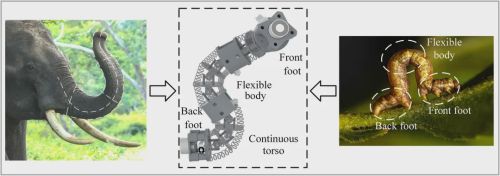 该机器人的结构设计灵感来源于尺蠖的结构特征和大象鼻子运动的灵活性
该机器人的结构设计灵感来源于尺蠖的结构特征和大象鼻子运动的灵活性
连续体机器人的核心是躯干。目前主流连接方式有两种:球形关节和万向节。
团队对比下来选了万向节。原因有二:一是摩擦小,驱动腱绳需要的拉力更低;二是能保证躯干轴向定位,质心分布更均衡。
最终方案是:整个躯干分三段,每段由两个关节模块串联,模块之间用万向节连接。单段关节组最大弯曲129°,整条躯干能弯387°,对折再对折还能再绕一圈。
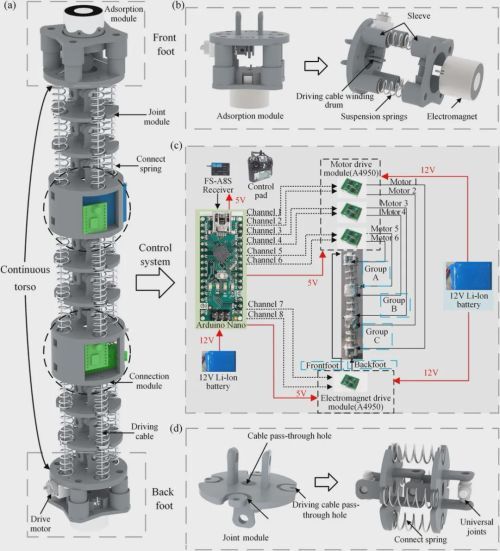 翻转式连续攀爬机器人的总体结构和控制系统示意图
翻转式连续攀爬机器人的总体结构和控制系统示意图
为了保证弯曲精度,他们用了“分段驱动”策略:每段关节组独立控制,避免长距离腱绳传动带来的摩擦累积和收缩不均。
02.
电磁脚:2毫米厚度钢板就能吸住
这个机器人如何爬壁?吸附方式选的是电磁铁。相比永磁体,电磁铁的优势是控制简单:通电吸、断电放,便于快速切换吸附状态。
选型结果是一枚额定电压12V、保持力15kg的螺线管(KK-P30/25)。
团队还做了个吸附性能测试:把电磁脚往不同厚度、不同材质的钢板上怼。Q235钢(相当于ASTM A36)、35#钢(AISI 1035)、45#钢(AISI 1045)轮着试。结论是:2毫米厚的钢板就能稳稳吸住。
这意味着它能在绝大多数工业设备表面作业,不用担心“吸不住摔成渣”。按团队测算,垂直壁面上最低需要80N法向吸附力、25N剪切吸附力,这枚电磁铁在2mm钢板上的表现完全覆盖。
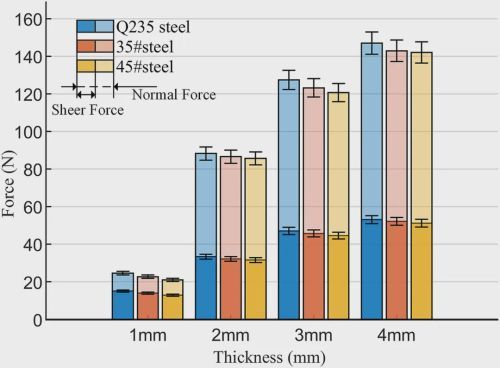 不同材料厚度下电磁铁在 Q235 钢、35# 钢和 45# 钢表面上的法向和剪切吸附力
不同材料厚度下电磁铁在 Q235 钢、35# 钢和 45# 钢表面上的法向和剪切吸附力
03.
实测验证:钻洞、转向、越障、跨平面样样行
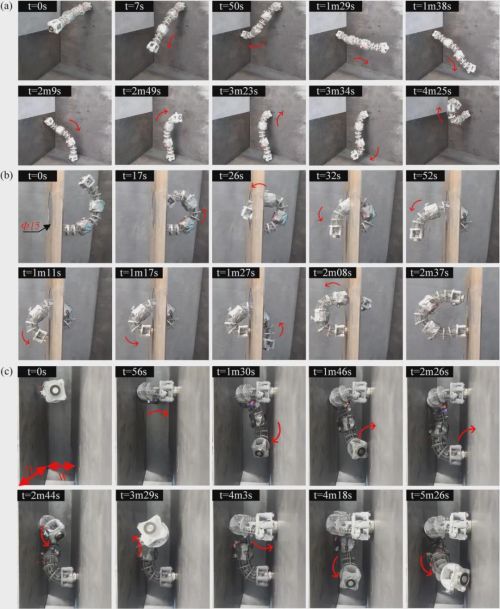
为验证机器人的作业能力,研究团队在实验室里设了一系列关卡。测试按三个层次展开:先看基础运动能力——攀墙、转向、跨平面、越障、负载;再看复杂环境适应能力——钻洞、窄缝移动;最后是进阶的变半径翻转能力。
攀墙:在垂直壁面上向上翻转时,躯干中部的关节组首先弯曲,主动缩短躯干长度,将重心拉近墙面,从而减小重力扭矩的不利影响,顺利完成向上翻滚。
转向:在垂直壁面上完成转向运动,最小转弯半径15厘米(0.37倍体长),最大转弯半径26厘米(0.63倍体长)。
跨平面:从一个垂直墙面翻转到另一个与之呈270度夹角的水平面,躯干弯曲速度3.75°/秒,完成跨越。

越障:面对墙面上长12厘米、宽7.2厘米、高8.5厘米的障碍物,它通过控制躯干关节组弯曲超90°,主动缩短躯干、改变运动空间,成功翻越后从垂直面过渡到水平面。
负载能力:垂直壁面上有效负载520克,约等于自重(约510克)的1.02倍。
钻洞:直径15厘米的小圆孔(约0.37倍体长),机器人躯干弯成Ω形,两端的吸附模块精准吸在薄板另一侧,丝滑通过。
窄缝移动:宽度11厘米的垂直通道(0.27倍体长),正常翻转步态施展不开,切换成“扭摆模式”——左右蠕动,交替吸附两端的磁脚,从“一线天”里爬了出来。
复杂环境适应性:在三个相互垂直的内表面之间连续运动,通过控制各关节组的弯曲和偏转角度,调整躯干以适应非结构化的空间。
变半径翻转:通过控制躯干中部关节组的弯曲角度,实现翻转半径的连续调节。最小翻转半径13.5厘米(0.33倍体长),平均速度3.68毫米/秒;最大翻转半径26厘米(0.63倍体长),平均速度5.2毫米/秒。
04.
组团干活:单打独斗不够?那就组团上
单机能力之外,团队还验证了多机协作。
两个机器人可以串联,变成一条更长的“机械蛇”。串联后从35厘米高的平台上翻下来——这高度是单机翻不过去的坎。它们交替当支点,稳稳把自己从高台“放”到地面。
也可以并联,组成“双体机器人”一起搬运重物。1.1公斤的东西,协同行走,稳当可靠。
这种“串并联”思路在连续体机器人里不算多见。串联增加长度、并联增加力气,给后续集群作业留了想象空间。
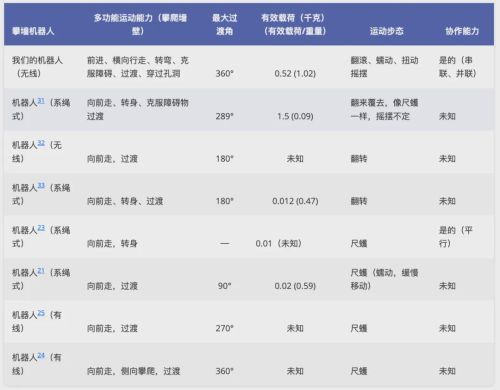 现有翻转机器人和软壁攀爬机器人的性能比较
现有翻转机器人和软壁攀爬机器人的性能比较
05.
结语
当然,这款机器人还在实验室阶段。
此次西南科大团队给出的方案是:刚柔结合的连续体躯干+电磁吸附+变半径翻转。目前是开环控制,靠遥控器发指令,但已经验证了它在复杂环境下的基本运动能力。
这套“刚柔结合+翻转步态”的思路,给爬壁机器人在复杂、非结构化和受限环境中执行救援、检查、作业和侦察等任务提供了新解法。
但团队也坦言,还有几个坎要过:
一是躯干刚度。现在的躯干够灵活,但想让它干精细活、背重物,还得再硬一点。下一步会用高刚度弹簧、缩短躯干长度来提刚度,提升承载能力和末端控制精度。
二是控制精度。目前靠“减少单段关节数量+缩短腱绳长度”来缓解,但没法根除。后续要研究基本步态动力学,开发针对性控制算法。
三是自主能力。现在还是遥控,下一步要加环境感知,让它能在非结构化环境里自己走。
从实验室到工程现场,还有一段路要走。但至少,方向是清晰的。未来该机器人的进化值得期待!
论文链接:https://doi.org/10.1177/21695172251400148