在人形机器人产业化的关键窗口期,小鹏与特斯拉两大科技巨头的入局,虽然同样是车企供应链的串性拒单,但本质上是两种技术哲学与商业逻辑的碰撞。
小鹏以“车机同源”的技术复用为核心,凭借十年智能汽车领域的积累实现后发先至;特斯拉则延续“纯自研+重投入”的路径,试图以汽车产业的规模优势定义机器人行业标准。
两者的竞争不仅体现在硬件参数的差异,更贯穿于技术路线、生态协同、量产能力与商业落地的全链条,其胜负将深刻影响全球人形机器人产业的发展格局。

01.
硬件架构
拟人化深度与算力效率的维度差异
人形机器人的核心竞争力,首先体现在硬件架构对真实世界场景的适配能力,对比小鹏IRON和特斯拉Optimus能看出显著差异。
在关节自由度这一核心指标上,IRON以82个全身关节自由度实现对特斯拉Optimus Gen2(50个)的碾压式优势,尤其是22个自由度的灵巧手,采用1:1人手尺寸设计与行业最小谐波减速器,能够完成拧螺丝、装配零件等高精度工业任务,而Optimus的灵巧手仅11个自由度,仅能满足基础抓握需求。这种差异背后是对应用场景的不同判断:小鹏瞄准工业制造与商业服务的高精度需求,而特斯拉仍聚焦于通用家庭场景的基础交互。

在形态设计上,小鹏突破了传统机器人的机械感局限,而Optimus仍采用直立行走模式,机械感明显。
这背后是小鹏机器人的设计师提出了首个通用人形设计系统 (General-Purpose Humanoid Design Framework)。这是一套可扩展的设计体系,让机器人能在不同身高和比例下,始终保持人形体态的匀称、美感、机械平衡。为此,工程师重新设计了多种关节执行器,使其体积大大缩小,在极其紧凑的空间内依照人体结构进行排布。让机器人的运动,展现出流动的机械之美。
在该系统的指导下,如同给机器人“量体裁衣”:既要让他看起来像人,又要让他的机械内部紧凑高效。它把造型、结构和动作这三部分的逻辑串联在一起,让“美感”和“性能”能够同步成长。这套系统通过参数化的规则,根据设计目标调整身体比例、重心和关节,让机器人不论高矮胖瘦都能保持外形协调,动作自然。
此外,其通过采用仿人脊椎结构与全包覆柔性皮肤,搭配仿生肌肉驱动系统,与此同时,双臂结构的优化进一步拓展了上肢的动态表现,让手臂能执行具有惯性特征的“甩手”动作,使整体步态更具节奏感,也更具“人味儿”,实现优雅拟人的猫步步态。同时,为了让机器人学会更自然、更像人的走路方式,工程师还采集了真人模特的步态数据。那些关于“台步”的细节——比如重心的摆动、肩线的节奏,都被精准地记录下来,成为他“学习走路”的第一课。
在这种比较下,重量与续航的平衡更凸显技术差距。例如IRON搭载能量密度>500Wh/kg的固态电池,实现全天续航,完全满足商业场景的连续作业需求;Optimus采用2.3kWh锂电池,续航仅4-8小时,难以脱离固定场景使用。这种差距源于小鹏对多端能源技术的整合能力,固态电池技术既来自汽车业务的积累,又针对机器人的轻量化需求进行优化,而特斯拉仍依赖传统锂电方案的迭代。
算力配置的差异则反映了两者对AI具身大模型上车的不同理解。小鹏IRON搭载3颗自研图灵(Turing)芯片,总算力突破2250TOPS,支持30B参数规模的物理世界大模型(VLT+VLA+VLM),能够实现“视觉-语言-动作”的全链路协同;特斯拉Optimus采用FSD+Dojo算力平台,虽未公开具体TOPS数值,但缺乏专用大模型支持,仍停留在单一任务执行层面。图灵芯片作为全球首颗多端通用AI芯片,其多核并行架构与DSA特定领域架构设计,确保在复杂场景下的有效算力利用率远超单纯的峰值算力堆叠,这是特斯拉依赖传统芯片架构难以比拟的技术优势。

02.
技术路线
复用创新与纯自研的效率对决
小鹏与特斯拉的技术路线差异,核心还在于“是否依赖已有产业基础”的战略选择。
小鹏的“车机同源”路线展现出惊人的研发效率:其在智能汽车领域积累的感知、决策、控制技术,直接迁移至机器人业务,例如XNGP智能驾驶的环境感知算法,无缝转化为机器人的场景识别能力;汽车电子电气架构的集中化设计经验,支撑了机器人的跨域协同;甚至图灵芯片的多端通用特性,使其既能赋能G7车型成为全球首款L3级算力AI汽车,也能为机器人提供定制化算力支持。这种技术复用模式,使小鹏机器人从研发到量产仅用5年,远快于行业平均8-10年的周期。

特斯拉则坚持“从零到一”的纯自研路径,Optimus的执行器、电子电气系统均为全新开发,虽能避免对既有业务的技术依赖,但也导致研发周期拉长。其FSD自动驾驶技术向机器人的迁移效果尚未显现,缺乏跨载体的技术协同效应。更关键的是,小鹏通过四足机器人“小白龙”完成了电机、关节和控制系统的早期积累,再过渡到双足人形机器人,技术迭代更为稳健;而特斯拉直接切入双足形态,跳过了四足阶段的技术验证,导致部分底层控制算法仍需通过大量实测优化。
在智能交互层面,小鹏的VLA(Vision-Language-Action)架构实现了从“感知-理解-动作”的端到端闭环,能够直接将视觉输入与语言指令转化为可执行动作,这一技术源于汽车端的智能驾驶模型迭代;特斯拉仍依赖传统的“感知-决策-执行”三段式架构,信息传递过程中存在一定损耗,难以应对复杂场景的动态变化。这种差异在长尾问题处理上尤为明显:IRON通过占用网络与多模态大模型融合,能有效应对未标注物体的突发情况,而Optimus在陌生场景下的泛化能力仍需验证。

03.
生态协同
车-机-飞一体化vs汽车单一赋能
小鹏的核心优势在于构建了“智能汽车-人形机器人-飞行汽车”的物理AI生态,这种跨载体的协同效应是特斯拉当前难以复制的。在技术层面,图灵芯片作为全球首颗多端通用AI芯片,同时支撑汽车、机器人、飞行汽车的算力需求,形成“一芯多端”的成本优势;智能驾驶算法在汽车端积累的海量数据,通过数据飞轮反哺机器人的场景理解能力,使IRON在工厂实训中快速适配汽车产线的装配需求。这种生态协同带来的不仅是研发效率的提升,更实现了供应链的规模效应——机器人的电机、传感器等核心部件可与汽车零部件共用供应链,大幅降低采购成本。
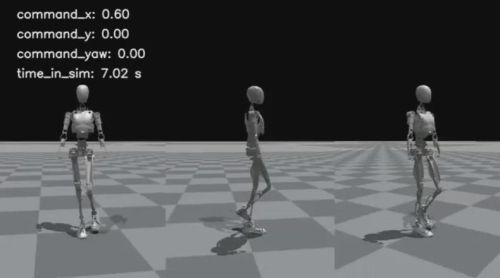
特斯拉的生态协同仍局限于汽车产业内部,Optimus的供应链虽能复用汽车的电机、电池产能,但缺乏跨品类的技术协同。例如,其Dojo超级计算机主要服务于汽车自动驾驶模型训练,对机器人的人形控制模型优化有限;而小鹏的AI大模型训练平台,同时支撑汽车智驾、机器人动作规划与飞行汽车路径决策,在数据处理阶段,运控工程师开发了一套新的动作重映射算法,让机器人在模仿人类步态的同时,避免了滑步和碰撞。在强化学习算法的加持下,经过仿真训练,机器人逐渐掌握了人类自然步态, 使得上机测试的成功率大大提升,并顺利从仿真环境过渡到真实世界,实现数据价值实现最大化。更关键的是,小鹏已与宝钢等工业客户达成合作,开放IRON的SDK接口,探索在复杂工业场景的定制化应用。
在制造体系上,小鹏的优势更为显著。IRON与汽车共线生产,肇庆工厂的高精度制造能力直接迁移至机器人装配,2025年3月已进入工厂实训,完成从研发到量产的关键验证;特斯拉虽拥有超级工厂的规模优势,但特斯拉仍未明确生态合作策略,Optimus的应用场景仍停留在内部测试阶段。Optimus的生产尚未与汽车产线协同,2025年仍处于内部测试阶段,2026年仅计划有限生产。
这种量产能力的差距其实源于小鹏对“产线共生”的提前布局,机器人在汽车工厂的实训过程,既是技术打磨的过程,也是生产工艺优化的过程,而特斯拉仍需单独搭建机器人生产线,面临产能爬坡的挑战。
04.
商业落地
量产节奏与场景渗透的战略分野
人形机器人的终极竞争是商业落地能力的竞争,小鹏与特斯拉在量产规划、价格策略与场景布局上呈现明显分野。
在量产时间节点上,小鹏已明确2026年底规模量产的目标,且已完成工厂实训、SDK开放等前置工作,截至2025年11月,工业场景合作意向已覆盖汽车制造、钢铁冶炼等多个领域;特斯拉Optimus的量产时间多次推迟,2026年仅计划有限生产,大规模交付仍无明确时间表。这种差距的核心是量产准备的充分程度:小鹏的供应链体系已实现90%以上的零部件国产化,而特斯拉仍依赖全球供应链,面临供应链短缺与物流成本的双重压力。

价格策略的差异体现了对市场接受度的不同判断。何小鹏提出IRON“与汽车同价”的目标,参考小鹏主力车型15-30万元的价格带,其终端定价有望控制在20-30万元区间,这一价格能够快速渗透工业与商业场景;特斯拉虽宣称Optimus目标售价2-3万美元(约14-21万元),但基于其过往产品定价策略,实际售价可能大幅高于预期,且短期内难以实现成本控制。成本优势的根源仍在于技术复用:小鹏机器人的电机、电控、芯片等核心部件均与汽车业务共享供应链,采购成本降低30%以上;特斯拉则需为Optimus单独构建供应链,规模效应难以快速显现。
场景布局的深度决定了商业变现的速度。小鹏采取“工业先行、商业跟进、消费补位”的梯度落地策略:2026年底量产首年,IRON将进入小鹏汽车门店、宝钢工厂等场景,提供装配、导览等服务;2028年拓展至文旅、零售等商业场景;2030年冲击100万台年销量目标,覆盖家庭场景。这种布局既利用了自有生态的场景资源,又通过B端订单快速形成规模效应。特斯拉则聚焦家庭场景,试图复制电动汽车的C端渗透路径,但家庭用户对价格敏感度更高、需求更分散,短期内难以形成规模化订单。
05.
长期竞争
生态壁垒与技术迭代的复利效应
从长期来看,小鹏与人形机器人赛道的竞争,本质是生态壁垒的构建与技术迭代复利效应的比拼。小鹏的“物理AI”生态已形成闭环:机器人与汽车共享感知、决策、算力技术,与飞行汽车共用能源系统,与Robotaxi协同数据训练,这种跨载体的技术复用使研发投入实现倍数效应。例如,IRON在工厂实训中积累的高精度控制数据,可反哺汽车的智能驾驶系统;汽车业务的大规模数据,又能加速机器人模型的迭代优化。特斯拉虽拥有庞大的汽车用户基数,但各业务线技术壁垒明显,在部分国家Optimus难以复用FSD的核心算法与数据资源。
技术迭代的速度差异更将放大竞争差距。小鹏依托汽车业务的快速迭代机制,建立了“研发-测试-量产”的闭环,图灵芯片的算力升级、大模型的参数扩容均能与汽车业务同步推进;特斯拉的技术迭代更依赖单一业务的突破,Optimus的算法优化缺乏跨场景的数据支撑。在智驾算法领域,小鹏已实现从VLM(视觉语言模型)到VLA(视觉-语言-动作)的进阶,能够直接生成可执行动作,而特斯拉仍停留在分段式端到端阶段,决策效率与场景泛化能力存在代差。
生态合作伙伴的差异则决定了商业落地的广度。小鹏已与宝钢达成合作,开放IRON的SDK接口探索工业场景应用,同时计划将机器人部署至自有汽车门店与办公园区,形成“自产自销+外部合作”的落地模式;特斯拉尚未披露明确的合作伙伴计划,仍以自建场景为主。这种差异背后是对生态价值的不同理解:小鹏将机器人视为连接多产业的智能终端,通过开放生态扩大应用场景;特斯拉仍将其作为汽车生态的补充,强调垂直整合的控制力。

06.
结语与未来
人形机器人赛道的竞争,最终是技术落地能力与商业生态构建能力的竞争。小鹏以“车机同源”的技术复用为shortcut,在硬件拟人化、算力效率、量产节奏上建立先发优势,更通过跨产业的生态协同打开商业空间;特斯拉虽凭借品牌与规模优势占据先发认知,但纯自研路径导致量产与成本控制面临挑战。
随着2026年量产节点的临近,小鹏IRON的落地将验证“技术复用+生态协同”模式的有效性,而特斯拉Optimus的进展则取决于其能否快速解决续航与成本问题。这场对决的结果,不仅将决定两家企业的行业地位,更将为全球人形机器人产业树立技术标准与商业范式,推动智能硬件行业进入“物理AI”的全新时代。