
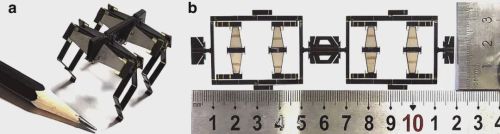
它只有1.2克重,比一枚一元硬币还轻,却能在草地狂奔、沙地穿行、石堆攀爬,甚至背着1.4克重物钻过L形弯道,还能下水游泳。
这不是科幻道具,而是国防科技大学团队刚刚登上《Nature》子刊《Microsystems & Nanoengineering》的全新作品——PLioBot,一款并联腿昆虫级折纸机器人。
PLioBot最狠的地方,不是它跑得快。虽然它确实快得离谱,每秒能飙44.6厘米,相当于每秒狂奔17.8倍身长。按这个比例,博尔特得跑出每小时300公里才能跟上。
真正让人眼前一亮的,是它居然是用一张“纸”折出来的。
01.
不是组装,是“长”出来的机器人
做微型机器人,最难的不是设计,而是制造。要在厘米级的尺寸里塞进去驱动器、传动机构、腿、关节,还得保证它们能协同工作,传统做法是分别造好各个零件,然后在显微镜下手工组装。工序复杂、对准困难,精度全靠手感。
哈佛的HAMR系列、科罗拉多大学的CLARI,都是这么造出来的。但问题是,这种方式很难规模化,也难保证一致性。
国防科大团队这次换了个思路,把所有东西都集成在一起,一次成型,然后折起来。他们用五层复合材料,把机器人的所有部件都压在一起:
压电陶瓷:驱动,相当于肌肉;
碳纤维预浸料:结构,纵向横向交叉铺层,相当于骨骼;
聚酰亚胺薄膜:柔性铰链,厚度0.025毫米,相当于关节。
飞秒激光切出精密槽口,包括驱动器位置、结构轮廓,连78个柔性铰链的位置,然后层压、加热固化,最后从材料上“撕”下一张完整的二维折纸机构。沿着折痕翻折、固定,一个三维机器人就这样成型。
整个过程零组装、零对准。论文里专门算了自由度。从初始的81个运动连杆、71个自由度,一路折到最后只剩32个连杆、8个自由度,刚好够用,不多不少。
这是首次在昆虫级压电机器人中实现驱动-结构一体化集成制造。
02.
最快跑44.6 cm/s,怎么做到的?
PLioBot的四条腿是并联腿结构,每条腿两个自由度,由两个独立的压电陶瓷驱动。通过调节相位差,足端可以画出椭圆轨迹。四条腿配合,走出小跑步态。
测试显示,当驱动频率怼到60Hz、相位差100°时,机器人进入共振状态,速度飙到44.6 cm/s,相当于每秒17.8倍身长。
对比一下现有成果:哈佛HAMR-Fast可跑10.1倍身长/秒,科罗拉多大学CLARI达到0.88倍身长/秒,而PLioBot是HAMR的1.77倍,是CLARI的20倍。
而且它不是只会傻跑,换个驱动信号,立马后退、左转、右转,指哪打哪。
有意思的是,当60Hz高速运动时,起跑瞬间会有角度偏差,往先动的那条腿方向偏。团队解释,这是高频启停冲击大、没有闭环控制导致的。不过,这也恰恰说明,PLioBot的动力输出足够强劲,足以在启动瞬间扰动机身姿态。
03.
不挑地形,能跑能游还能钻
光跑得快不够,能在复杂环境里完成任务才是真功夫。
PLioBot尺寸紧凑,能钻进最小2.5厘米宽的缝隙。由于采用了背负式驱动器布局,驱动器和结构都装在顶部,底盘高度和通过性得到了极大提升,在狭窄空间里不容易被卡住。
团队先测试了它在不同粗糙度表面上的表现。玻璃、亚克力、海绵。表面越光滑,打滑越严重,速度越慢。
接着是爬坡测试。3°、6°、9°、12°,速度逐级下降。12°是极限,再高就翻车。
真正考验的是隧道和L形弯道。PLioBot钻进16厘米长、3厘米宽的隧道,背上驮着1.4克载荷,以8.56 cm/s(3.42倍身长/秒)的速度顺利通过。
面对L形弯道,同样背着1.4克负载,PLioBot先小跑步态进入,到拐弯处无缝切换成快步态,丝滑过弯。

更绝的是,它能换“鞋”下水,团队配了两种可更换脚垫。
半球形脚垫:点接触,适合不平整地形。碎石路(直径3-5毫米)、鹅卵石路(5-10毫米)都能爬。腿部结构会随着地面起伏自适应变形,不会翻车。

鳍状肢:下水专用。7厘米水深,沿鱼缸底部爬行速度1.93 cm/s;绑上泡沫还能在水面划水。
最深度的测试是沙地+10°斜坡+浅水无缝过渡,在沙地易陷、斜坡易滑、浅水易飘的境况下,PLioBot三种地形一次性通过。
04.
还不是完全体
PLioBot目前还拖着电线。因为需要200V高压驱动,现有的微型电池和升压电路还没集成上去。团队下一步要搞的就是微型高压集成电路,把这1.2克的小家伙彻底解放。
到那时候,它才能真正钻进废墟、爬进管道、潜入水下,去人类进不去的犄角旮旯干活。
论文里有一组“速度-负载曲线”专门为这一步铺路。0.8克以下缓降,0.8-1.2克陡降,1.2-1.7克平台期,1.7克以上线性下降。这条曲线告诉团队,如果想做无线版本,电路加电池必须控制在0.8克以内才能保住速度。
对于这项技术本身,团队给出了一个更宏观的判断:PLioBot的配置设计、制造工艺和折纸成型方法,可以沿用到其他昆虫级机器人上。
换句话说,这套打法是可以复制的。以后设计微型机器人,图纸画好、激光一切、一折一粘完事。折纸+压电+一体化制造,这可能是昆虫级机器人的一个新方向。
论文链接:https://doi.org/10.1038/s41378-026-01205-4