“我以为你会再高一点,说实话,我从没见过这么矮的雪人。
NVIDIA GTC 2026主题演讲结尾,英伟达 CEO 黄仁勋与一位特殊的嘉宾——迪士尼“雪宝(Olaf)”机器人上演了一场跨次元的对话。面对老黄的调侃,雪宝机智回应:“才不是呢。”
这个源自《冰雪奇缘》的角色以实体机器人的形式出现在舞台上,展示了其在行走、表情控制等方面的能力,不仅展示了迪士尼乐园未来的模样,更向全球昭示了“物理AI”时代的全面到来。
这场展示并非单纯的舞台效果,而是迪士尼研究院在物理AI领域的一次技术呈现。值得注意的是,支撑雪宝完成这些动作的核心动力系统,来自宇树科技(Unitree)。
01.
非对称结构与紧凑空间下的驱动挑战
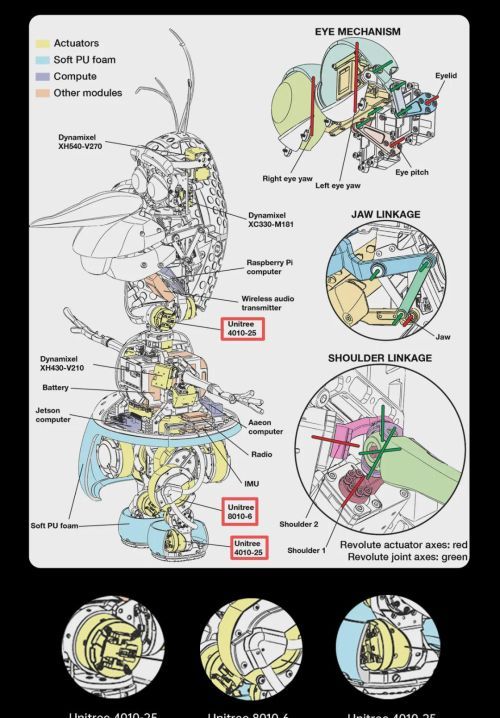
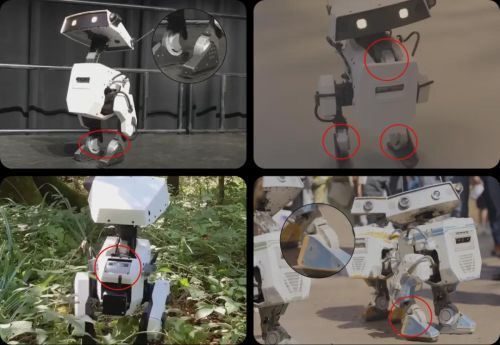
雪宝的机器人版本在结构上与其动画形象保持一致:巨大的脑袋、纤细的脖子以及完全隐藏在裙摆下的“悬浮”双脚。为了实现动画中具有表现力的“浮动步态”,迪士尼团队在裙摆内部设计了两条非对称腿部结构,以在有限空间内解决运动干涉问题。
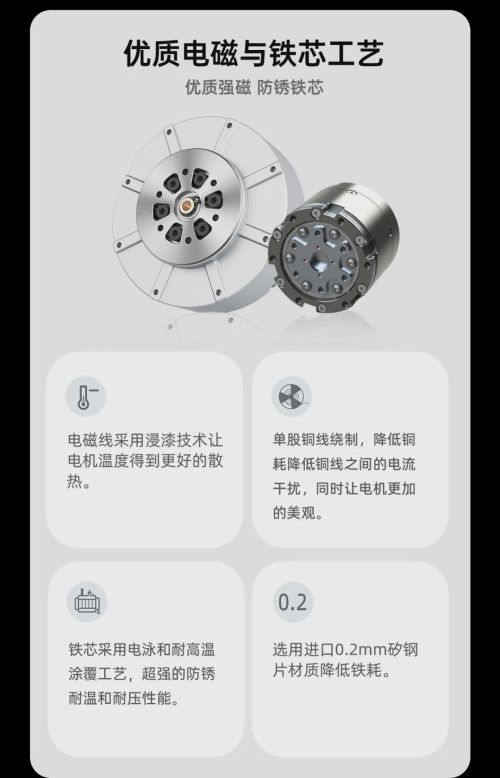
在这一紧凑结构下,电机需要具备较高的推重比和集成度。宇树科技提供的两款高性能电机——Unitree 8010-6 和 Unitree 4010-25,被用于雪宝的腿部与颈部驱动,帮助机器人走出了独有的“雪宝式”灵动感。

走进迪士尼R&D实验室,
看机器人雪宝如何实现自由行走:Walt Disney Imagineering
https://www.youtube.com/watch?v=EoPN02bmz-rE&t=1566s
 宇树电机图
宇树电机图
02.
电机在多自由度系统中的关键作用
雪宝的每条腿配备3个自由度,涵盖髋部旋转、膝盖摆动和足部伸缩。在整体自重达14.9公斤的情况下,宇树电机提供了所需的扭矩输出,支撑其完成非对称步态行走。
在头部控制方面,由于“大头细颈”的结构特点,颈部电机需要在狭小空间内同时满足扭矩输出与响应速度的要求。宇树4010-25电机被用于该部位,其精准响应确保了雪宝表情的实时性与生动感。

03.
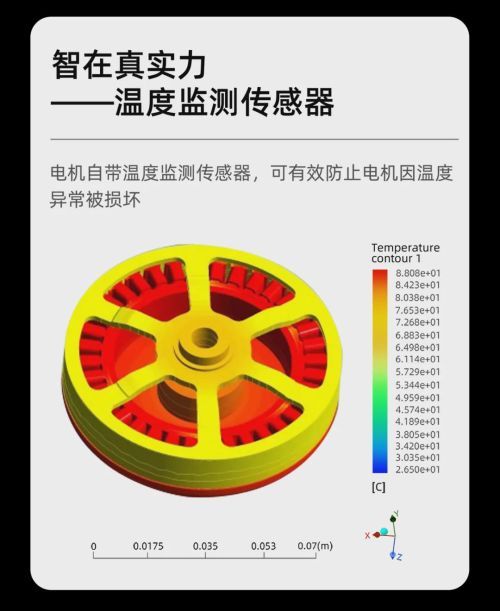
强化学习与硬件协同:散热与力矩控制
由于雪宝外层为布料包裹,散热空间有限。研发团队将宇树电机的实时温度反馈信息集成进强化学习控制策略中,通过“热感知”方式对电机运行状态进行调节,以保证长时间演出中的动力稳定性。
此外,宇树电机具备高度集成的力矩控制能力,配合强化学习算法,使雪宝在行走过程中能够根据地形变化实时调整落脚点,维持平衡并减少关节撞击产生的噪音。测试数据显示,行走噪音从82分贝降至64分贝。
这并非宇树电机首次出现在GTC舞台。在2024和2025年NVIDIA GTC大会上,迪士尼展示的双足机器人BD-X同样采用了宇树的驱动方案,包括GO1高性能电机及动力电池系统。
从BD-X到雪宝,宇树的电机产品已连续多年被应用于迪士尼研究院的机器人项目中。宇树提供的底层动力硬件,与NVIDIA的仿真平台、迪士尼的算法与控制策略形成协同。
随着物理AI与具身智能技术的发展,机器人系统对硬件的集成度、响应速度和控制精度提出了更高要求。宇树科技通过持续迭代高性能电驱方案,逐步进入全球机器人研发体系,成为具身智能硬件层的重要组成部分。在技术与应用的交汇点上,硬件与算法的深度协同,正在推动机器人从实验室走向现实场景。