如果一台水下机器人在浑浊的河口下潜,泥沙让能见度降到半米以内,螺旋桨搅起的湍流又把声呐信号搅成一团乱麻——它该如何感知周围的世界?主流方案摄像头和声呐系统在这里会集体失灵。前者依赖光线,后者在水流噪声中难以分辨微弱的回波。
近日,浙江大学机械工程学院汪延成教授团队联合新加坡国立大学电子与计算机工程系 Chengkuo Lee教授在《Advanced Materials》发表题为“AI-Enhanced Bionic Aquatic E-Skin Enables Precise Capture of Minimal Tactile Differences Toward Undisturbed Underwater Interaction”的研究成果:一种受鲨鱼启发的仿生水下电子皮肤。

它不仅能承受深水的巨大压力,还能在湍急水流中分辨出仅0.8微米宽度的表面纹路——相当于一根头发丝直径的五十分之一。
01.
为什么偏偏是触觉
提起水下探测,你可能会想到声呐扫描海底地形,或者水下摄像机拍摄珊瑚礁。但在水下机器人领域,触觉几乎长期被边缘化,它需要物理接触,感知距离短,更要命的是,水流本身就是个巨大的噪声源,足以把任何由表面微小差异引起的触觉信号淹没在流致干扰里。
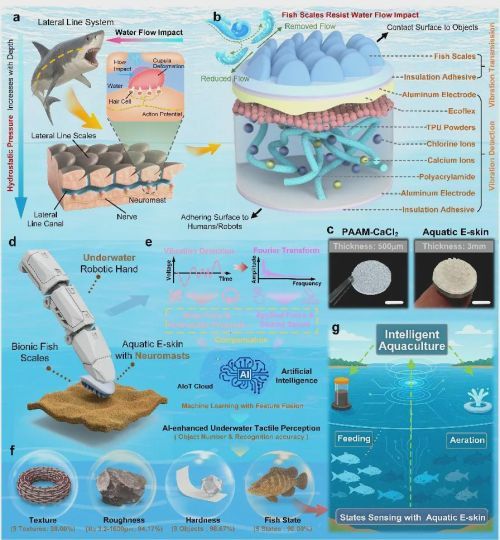
然而,研究团队注意到了自然界中的一个现象。鲨鱼在浑浊、昏暗的海洋中捕猎时,并不完全依赖视觉或听觉。它们身体两侧有一条被称为“侧线系统”的感知器官,能通过皮肤表面的鳞片,从复杂的水流背景中筛选出猎物游动引起的微弱压力波动。即便在湍急的洋流中,鲨鱼依然能精准定位。
这给了研究者一个启发。触觉并非不行,而是没有把它的潜力发挥到极致。问题的核心,在于如何从强水动力噪声中“解耦”出真正由物体表面差异引发的微弱触觉信号。
02.
如何让机器人“摸”清世界
Saranga(指代水下电子皮肤,可称为“仿生侧线皮肤”)系统的解决方案,是一套“仿生机械滤波 + 深度学习特征融合”的。
首先,研究团队从鲨鱼侧线鳞片获得灵感,在传感器表面设计了一层仿生鱼鳞阵列。每片“鱼鳞”以45度角翘起,长2毫米,厚度仅0.64毫米。当水流冲击时,柔软的鳞片会弯曲变形,像一把把小伞,消耗掉部分水流动能,同时将水流分流引导——大部分湍流从侧面滑走,只有少量减弱后的水流到达传感核心。这是一个纯粹的物理降噪步骤。
实验数据很直观,在每秒0.2米的水流中,没有仿生鳞片的传感器基线波动高达±25毫伏;加上鳞片后,波动降至±13毫伏,噪声几乎减半。即使在每秒0.5米的较强水流中,波动也能控制在±20毫伏以内。
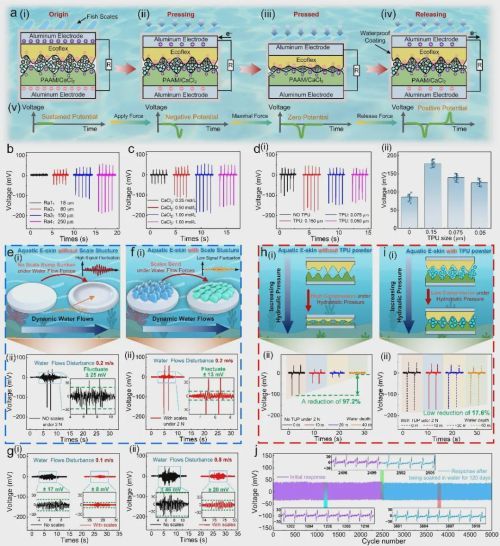 水下电子皮肤的工作原理及抗扰性能
水下电子皮肤的工作原理及抗扰性能
但这还不够。深海的另一个杀手是高压。传统电子皮肤内部常留有空气间隙来保证灵敏度,但在几十米水深下,这些空隙会被压缩殆尽,两层材料直接贴死,信号几乎消失——40米水深时衰减高达97.2%。
研究团队的解决方案出人意料:用微小的弹性粉末颗粒代替空气间隙。他们选用热塑性聚氨酯粉末,粒径仅0.15微米,填充在两层摩擦电材料之间。这些粉末像无数个微型弹簧,既能维持稳定的间隔距离,又能缓冲外部压力。结果,在40米水深下,传感器的输出响应仅衰减17.6%。相当于给电子皮肤穿了一件“抗压服”。
最后,传感器表面还涂覆了一层高疏水性油膜。海水中的离子一旦渗入,会形成额外的电流泄漏路径,严重干扰信号。油膜像一层隐形雨衣,把水分子牢牢挡在外面。经过120天海水浸泡和5000次反复按压,传感器性能几乎纹丝不动。
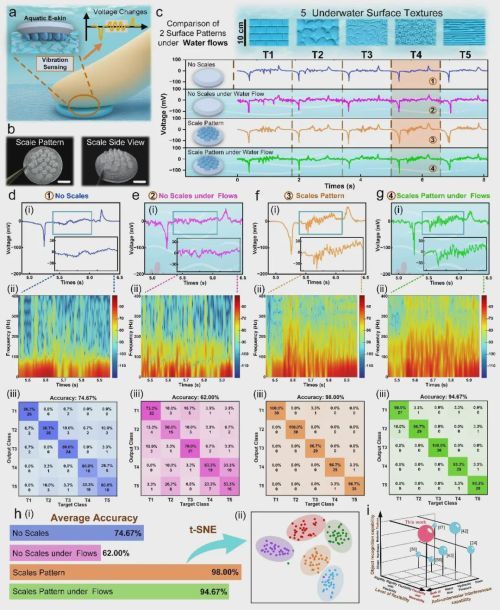 AI增强型水下电子皮肤的综合表面纹理识别
AI增强型水下电子皮肤的综合表面纹理识别
物理降噪解决了水流和压力问题,但真正让这层皮肤“智能”起来的,是深度学习。
研究团队构建了基于特征融合的深度学习模型,这个模型的并行分析两种信息:一是时域特征——电压信号随时间的变化,反映按压力度和静水压力造成的幅度偏差;二是频域特征——将信号分解成不同频率成分,这可以消除滑动速度和动态水流带来的干扰。
两种视角互补,大大提升了对微小差异的分辨能力。在静态水下,带有仿生鳞片的电子皮肤识别五种不同纹理的平均准确率高达98%。当水流开启,准确率依然保持在94.67%。而没有仿生鳞片的对照设备,静态水下只有74.67%,水流中更是跌至62%。
03.
从实验室走向海洋
研究团队展示了两个实际应用场景,让这层“皮肤”从概念走向真实任务。
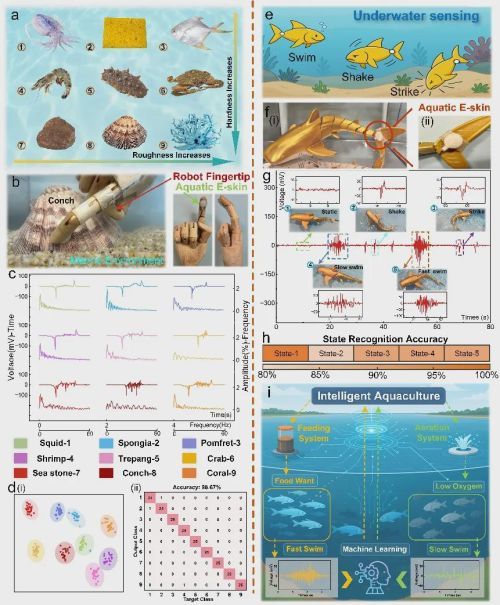
场景一:机器人手指识别海洋生物
将电子皮肤贴在机器人手指尖上,让它在模拟海水中识别九种海洋生物和物体:鱿鱼、海绵、鲳鱼、虾、海参、螃蟹、海螺、石头和珊瑚。这些物体的硬度和表面形貌差异很大。硬质物体(如石头)会引发强烈、不稳定的力波动;软质物体(如海参)表面突起在按压下会弯曲,将连续的接触过程打散成一连串离散的微小碰撞。
基于特征融合深度学习,机器人手指达到了98.67%的平均识别准确率。这意味着,未来水下机器人可以在能见度为零的环境中,仅靠触摸就能区分一块石头和一只海参——这对于海底采样、考古或生态监测意义重大。
 AI增强型水下电子皮肤在不同场景下的触觉感知应用
AI增强型水下电子皮肤在不同场景下的触觉感知应用
场景二:机器鱼尾巴感知游泳状态
更有想象力的是把电子皮肤贴在机器鱼的尾部。这里没有固-固滑动摩擦,传感器感知的是鱼尾拍打时反作用的水动力以及结构自身的微振动。信号幅度反映摆尾力度,频率特征则编码尾部击水的节奏。
研究人员区分了静止、抖动、撞击、快速游动和慢速游动五种状态,深度学习平均准确率达到90%。主要混淆发生在快游与慢游之间——这两种状态的信号差异确实很小,但已经足够实用。
基于这一能力,团队提出了一个智能水产养殖系统的构想。每条鱼的尾部电子皮肤将行为状态上传至中央系统,汇聚成鱼群活动指数。如果指数在短时间内显著升高,说明鱼群处于觅食性快游状态,系统判定饥饿,自动触发投喂装置。如果整体活动指数下降,同时伴随大量不规则抖动或撞击行为,则推断为水中溶解氧过低,启动增氧器。
这套系统实现了精准投喂和按需增氧,避免了传统养殖中定时定量投喂造成的饲料浪费和水质污染。相比依赖光学摄像头的水产监测方案,触觉方案不受水体浑浊度影响,且不需要对鱼类进行标记或训练。
04.
结语
这项技术的意义不仅在于“做了一款更好的传感器”。它首次证明,在动态水流和高静水压的恶劣环境中,触觉感知可以成为可靠的水下探测通道。
未来,研究团队计划进一步将单像素电子皮肤拓展为稀疏阵列和多手指协同系统,实现时空触觉成像——让机器人不仅能“摸”到物体,还能“感知”出形状和轮廓。同时,抗生物污损涂层和自修复防水技术也在研发中,以应对海洋中长期浸泡的挑战。