机器人的眼睛,这次真的开窍了。
不是简单的感光元件升级,不是算法层面的去噪优化,而是从硬件底层,长出了真正会思考会变形、能主动调节光线的瞳孔。
本周,《Science Robotics》封面刊登了北卡罗来纳大学教堂山分校和西湖大学团队的突破性成果:一种基于液态金属的仿生自适应瞳孔反射视觉系统。
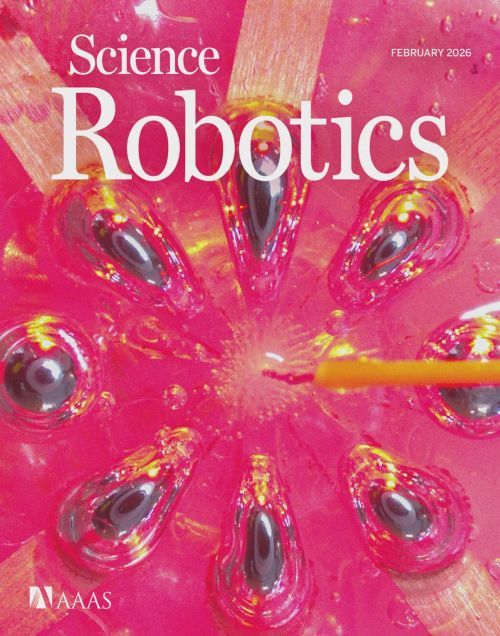

它不仅能模拟猫、羊、乌贼等多种动物的瞳孔形状,还能在强光下自主收缩,把过曝的图像识别精度从68.38%直接拉到83.56%。
换句话说,机器人终于学会了“瞳孔调节”,而且调得比人还讲究。
01.
瞳孔的秘密,远比你想象的复杂
你有没有想过一个问题:为什么猫是竖瞳,羊是横瞳,乌贼是W形,人类是圆的?
不是设计师偷懒,是生存刚需。
猫科动物是伏击型猎手,竖瞳能精准判断猎物距离,同时把前景之外的区域虚化,专注暗杀。
羊是草食动物,横瞳赋予它们几乎360度的地平线视野,一边低头吃草一边盯着狮子什么时候来。
至于乌贼那种W形瞳孔,在水下折射环境中能精准捕捉运动的虾蟹。
瞳孔的形状,本质上是一套极端优化的光学硬件。而现有的机器视觉系统,瞳孔是死的。固定光圈,固定进光量,遇上正午太阳直射,要么过曝,要么靠算法硬修。
算法硬修不是不行,但代价是算力、延迟、功耗三连跳。人类眼睛0.2秒完成的瞳孔反射,商用视觉系统得算好几帧。
这项研究的核心思路很直接:与其让机器事后算,不如让它硬件层面自己调。
02.
液态金属:既是人工瞳孔,又能模拟神经信号
这项工作的最大亮点,是让液态金属同时干了两份活:它既是可编程变形的仿生瞳孔,又是模拟神经脉冲的人工神经元。
怎么做到的?
先说变形逻辑。
液态金属在碱性溶液里会形成一层极薄的氧化膜。给它加上电压,就能精准控制它的表面张力。电压越高,氧化膜越厚,液滴越扁平,在微流道里铺展得越快。
研究团队把8个这样的液态金属单元围成一圈,每个独立控制。想要猫的竖瞳?上下两个单元收缩。想要羊的横瞳?左右收缩。想要乌贼的W形?编程调一下,2秒钟变形完毕。
整套系统没有机械马达,没有齿轮传动,靠的是电化学驱动的表面张力博弈
再看神经模拟。
液态金属在电极间反复“接触-断开”会产生尖峰电流,频率随光照强度线性变化,光照越强,频率越高。这不就是生物神经元传递信息的物理复刻吗?
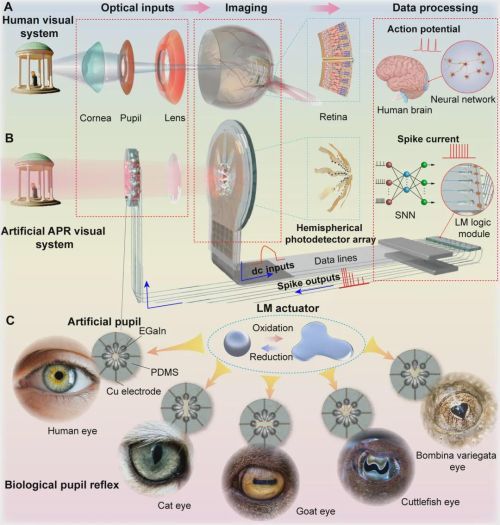
仿生自适应视觉系统设计
03.
视觉记忆:照一遍就忘,照十遍就记住了
另一个很有趣的点:这套系统,会记事儿。
它的感光单元用的是氧化铟和Y6有机材料的异质结。氧化铟有个特性:被紫外线照过之后,光电流不会立刻归零,可以持续光电导。
研究团队把字母“U、N、C”投影到半球状的感光阵列上,发现同一个图案被照10次,光电信号能持续20秒不消失。这像极了人脑的短时记忆向长时记忆转化的过程,训练次数越多,忘得越慢。
这样,视觉输入-电信号编码-状态保持-衰减遗忘,一整套闭环就此形成。
04.
强光下认东西,不用靠算法硬修
讲完原理,上硬指标。
研究团队用MNIST手写数字集(由7万张手写数字图片组成的经典图像识别测试库)做了测试,给每张图人工加了150%的模拟噪声,模拟烈日下的过曝场景。未经瞳孔调节的系统,识别率68.38%。
开启自适应瞳孔反射后,液态金属自动收缩,遮挡部分进光,有效滤除背景噪声。同一组图,识别率83.56%,飙升15个百分点。
这不是算法算力堆出来的15%,是硬件物理干预省下来的算力余量。
更直观的测试来自模拟自动驾驶场景。研究团队用YOLOv5跑了一段隧道进出场景:出隧道瞬间强光过曝,原始画面置信度明显滑坡;但搭载APR系统的画面,液态金属瞳孔迅速缩到0.6cm孔径,进光量压回安全阈值,车标轮廓清晰锁定。
进入隧道后,光照骤降,系统反向往回扩,整个过程0.5秒内完成闭环。人类瞳孔反射约0.2-1.5秒,这套人造系统已经摸到了生物响应的下限边缘。
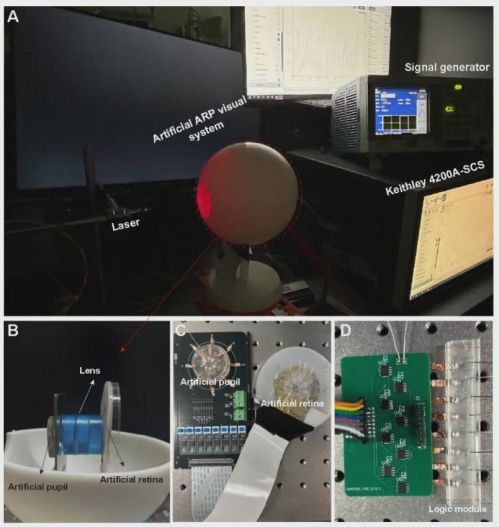
实验装置
05.
这对机器人意味着什么?
把这套系统装到机器人上,能干啥?
- 自动驾驶:进出隧道不再过曝,逆光也能看清行人。
- 安防机器人:白天强光下巡逻,瞳孔自动收缩,画面清晰;夜晚暗光下,瞳孔放大,保留更多细节。
- 搜救机器人:在废墟、烟雾等复杂光线环境中,自适应调节进光量,不用反复调整摄像头参数。
- 仿生机器人:一套硬件,就能模拟猫的专注瞳孔、羊的全景瞳孔,根据任务切换视觉模式。
这不是算法升级,是硬件层面的代际跨越。
06.
结语:从“看得见”到“看得懂”,
机器视觉这些年进步飞快,高分辨率、低功耗、边缘计算,把图像的清晰度推到极致。但一个常被忽略的事实是:再强的算法也补不了硬件层面的物理过曝。
这项研究的价值,不是又做了一个仿生眼,而是找到了一个极其聪明的切入点:
用液态金属的电化学变形,同时解决光学调节和神经编码两个问题,让机器人拥有了生物级的自适应能力——光线强了知道收,光线弱了知道放,遇到不同任务还能切换瞳孔形状。
论文链接:
https://www.science.org/doi/10.1126/scirobotics.adx0715