

资讯

全球首个视频转3D具身数据集开源 动捕遥操或成过去
清华大学与枢途科技联合推出RoboWheel数据引擎,可将普通单目相机拍摄的人类手-物交互视频转化为适用于多种机器人的训练数据,并开源大规模数据集HORA。这一突破有望解决机器人学习领域的'数据荒'问题,降低对昂贵动捕设备的依赖,推动具身智能发展。


枢途开源HORA数据集:10万轨迹全视频采集,赋能通用具身训练
枢途科技发布业界首个从真实场景人类视频中提取的多模态具身智能数据集HORA,包含15万条高质量轨迹,覆盖多种实际应用场景。该数据集基于SynaData技术构建,支持毫米级轨迹提取和跨本体适配,有效解决传统数据采集成本高、通用性差的问题,为机器人技能训练提供完整、可直接使用的数据基础。

北大团队研发智能机器鱼,水下机器人能力再突破
北京大学谢广明教授团队在《Science Advances》发表研究成果,提出一种模块化自重构机器鱼群系统。该系统通过模仿鱼类多样运动方式,使机器鱼既能独立游动,又能根据任务需求拼接成不同构型,显著提升了水下机器人的运动性能、环境适应性和任务灵活性,为复杂水域探索与救援提供了创新技术方案。

MIT与UC伯克利团队研发LVP模型 机器人一瞥即可完成新任务
MIT、UC伯克利和哈佛联合团队开发的LVP模型,通过视频生成技术让机器人无需专门训练即可执行陌生任务。该模型利用140万条视频数据学习人类动作逻辑,并转化为机器人控制指令,在零样本测试中成功完成多种复杂任务,突破了传统机器人依赖特定动作数据的限制。

北大机器智能实验室研发机器鱼0.5秒完成形态转换
北京大学机器智能实验室在《Science Advances》发表研究,开发了一种基于张拉整体结构和仿生变刚度肌肉的多模态软体机器鱼。该机器鱼能在0.5秒内通过调节关节刚度,实现从高机动的鳗鲡模式到高速冲刺的金枪鱼模式等多种游动模态的自由切换,为揭示鱼类游动的生物力学机制提供了统一的实验平台,并在速度和灵活性上取得了突破。

Cell Reports Medicine发表!龙尔平万沛星团队推出医疗大模型框架MCC显著提升推理能力
中国医学科学院与北京大学团队在《Cell Reports Medicine》发表研究,提出MCC框架,通过多模型对抗与协作机制提升医疗AI推理能力。该框架模拟多学科专家会诊,实现交叉质证与协同决策,在MedQA等基准测试中准确率超过92.6%,刷新多项纪录,推动医疗AI向可靠、可解释方向演进。
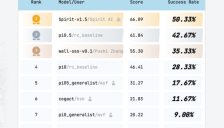
千寻智能开源Spirit v1.5 重塑国产具身模型发展规则
千寻智能开源Spirit v1.5具身智能大模型,在RoboChallenge基准测试中以66.09分超越Pi0.5夺冠,标志着国产模型在真实任务操作上取得关键突破。该模型已应用于宁德时代生产线,并通过开源推动产业生态发展,实现从实验室演示到真实场景可用的跨越。

国产算力与自主创新架构助力GLM-Image实现多模态SOTA性能,全链路适配昇腾芯片
智谱AI与华为联合开源GLM-Image多模态大模型,该模型采用自主创新架构,在图像生成性能上达到国际领先水平,并首次实现从数据处理到推理全流程基于国产昇腾芯片和MindSpore框架,标志着国产AI生态在自主可控与高性能应用上迈出关键一步。

腾讯微信AI团队发布WeDLM扩散语言模型,显著提升推理效率
腾讯微信AI团队推出新型扩散语言模型WeDLM,通过创新性的拓扑重排技术融合扩散模型与因果注意力机制,有效提升推理效率。该模型在GSM8K等任务中速度比优化自回归模型快约3倍,同时保持高生成质量,适用于智能客服、代码生成等场景,有望降低计算成本并改善用户体验。

西交大联合团队再发AFM 剪纸技术革新磁控柔性器件
西安交通大学联合团队在《Advanced Functional Materials》发表创新研究,提出基于层间应力辅助预变形的磁化策略,通过激光直写技术实现微磁畴精密编程。该技术成功构建了可磁控旋转的微型剪纸结构阵列,实现了透光率从10%到62.6%的线性可逆调控,为智能遮光、微流控等应用提供了高效、可批量制造的解决方案。

无人车社交化,具身交互智能推动自动驾驶落地
本文介绍了清华大学和北京工业大学研究团队提出的无人驾驶具身交互智能理论框架,旨在解决无人车与人类、车辆及环境之间的双向认知协同难题。通过跨媒体感知、机器学习等技术构建端到端的感知-认知-行为闭环,使无人车具备情境理解、持续学习和安全交互能力,推动自动驾驶向真正智能化迈进。

中国团队研发生物履带机器人 实现水陆两栖仿生突破
西安交通大学团队研发出全球首个能稳健实现水空界面无缝穿越的仿生攀爬机器人,采用创新的空心蘑菇状粘附微结构,结合壁虎的范德华力与章鱼的负压吸附原理,解决了机器人在复杂环境中跨介质攀爬的难题,为高风险作业场景提供了全新解决方案。

Vercel发布Agent Browser 大模型可操控网页
Vercel发布Agent Browser,这是一款专为AI代理设计的浏览器自动化CLI工具,首次让大模型能够直接操控网页,实现点击、填写、提交等交互操作。工具零配置上手,支持可视化调试和静默执行,通过精简数据结构提升93%的推理效率,兼容主流AI生态,标志着AI从被动理解迈向主动执行的关键突破。


昇腾助力TransMLA:无需重训即可适配主流大模型
北京大学团队提出TransMLA转化框架,无需重训即可将主流大模型(如LLaMA、Qwen)迁移至高效的MLA架构,显著降低企业适配成本。该框架通过结构映射、RoRoPE位置编码适配等关键技术,在昇腾算力支持下实现KV缓存大幅压缩与推理速度提升,为大模型长上下文推理提供软硬件协同解决方案。

开源模型评测超越GPT-4 具身智能迎来突破时刻
文章报道了自变量开源端到端具身智能基础模型WALL-OSS在RoboChallenge评测中超越pi0,排名第二,并在多个单动作任务中位列第一。文章探讨了开源模型在推动具身智能产业生态繁荣、降低行业创新成本以及加速技术落地方面的关键作用,分析了其彻底开源策略对行业发展的深远意义。







