

资讯

英伟达开源自动驾驶模型 推动物理AI发展
英伟达在CES 2026上宣布开源自动驾驶模型Alpamayo,标志着物理AI新时代的到来。该模型是全球首个能思考推理的开源AI系统,专为自动驾驶设计,并配套提供仿真工具AlpaSim和开放数据集。尽管在L2级市场面临竞争,英伟达通过与奔驰合作及开源策略,旨在推动自动驾驶技术普及并重夺行业话语权。

PI VLA模型解读系列:从π0模型到Hi Robot
本文系统解读了Physical Intelligence(PI)从2024年10月到2025年12月在具身智能VLA模型领域的发展历程。文章详细介绍了π0模型的混合专家架构、工作流程及其与PaliGemma的区别,并梳理了后续π0-FAST、Hi Robot系统、π0.5、π0.5-KI、π0.6等关键模型与技术的演进,如FAST分词器、知识绝缘范式、实时动作分块算法和RECAP方法,展现了PI在机器人视觉-语言-动作模型上的技术突破与创新路径。

数据驱动技术重塑海洋机器人控制:港科大与大连海事大学团队发布权威综述
本文系统介绍了数据驱动方法如何革新海洋机器人控制领域。文章基于港科大与大连海事大学团队在顶刊发表的权威综述,分析了传统控制方法在复杂海洋环境中面临的非线性、模型不确定性等瓶颈,并重点阐述了基于机器学习的数据驱动控制技术如何帮助海洋机器人实现自适应、高鲁棒性的智能升级,涵盖AUV、ROV、USV等多种平台及协同控制应用。

月之暗面新模型Kiwi-do亮相 AI界震动
月之暗面在完成35亿融资后,其神秘新模型“Kiwi-do”在LmArena平台亮相,训练数据截至2025年1月,在视觉物理推理测试中表现卓越,被猜测为多模态模型K2-VL。该模型展示了强大的视觉与语言融合能力,预计将推动文档解析、仪表盘分析等商业应用,引发AI界广泛关注。

谷歌测试Nano Banana2Flash图像模型,主打高速高性价比
谷歌正在秘密测试其Gemini Flash系列的新成员Nano Banana2Flash图像模型,该模型主打极致速度和性价比。作为目前谷歌最快的生成式AI图像模型,它继承了高端版本Nano Banana Pro的现实世界知识理解能力,并优化了生成逻辑,适合实时交互、快速迭代设计草图及社交媒体内容生成等场景,旨在降低AI图像技术的使用门槛。

中国电信发布开源千亿MoE大模型TeleChat3 全栈自研对标国际顶尖
中国电信开源国产千亿参数MoE大模型TeleChat3系列,包括TeleChat3-105B-A4.7B-Thinking和TeleChat3-36B-Thinking。模型基于15万亿tokens数据训练,全栈适配华为昇腾生态,支持国产算力。创新引入‘思考模式’,提升复杂任务推理能力,性能对标国际顶尖模型,已在GitHub和魔搭平台开源。
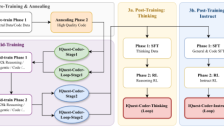
北京幻方发布40B参数大模型 开源引发AI领域关注
九坤投资开源IQuest-Coder-V1系列大模型,40B参数版本在SWE-Bench Verified榜单取得81.4%高分,超越Claude Opus-4.5等知名模型。该系列提供7B、14B、40B三个版本,支持代码生成与理解任务,并创新采用代码流多阶段训练策略,提升逻辑动态捕捉能力。模型可在单张3090/4090显卡运行,大幅降低使用门槛,展现了中国AI领域的重要进展。


DeepSeek 发布突破性研究:架构优化显著提升AI推理能力
DeepSeek最新研究揭示,通过优化神经网络架构而非单纯扩大模型规模,可显著提升大语言模型的推理能力。其提出的“流形约束超连接”方法解决了信号传播不稳定问题,在多项基准测试中实现性能突破,同时仅增加约6%-7%的训练开销,为AI发展提供了高效且经济的新路径。

软体机器人突破!110克设备承重达10倍自重
本文介绍了一款创新的软体机器人,它融合仿生学与折纸艺术,仅重110克却能承载10倍自重的负载。该机器人采用气动驱动和双稳态自锁设计,能适应从0.5毫米到32毫米不同直径的缆绳,并在结冰、油腻等复杂表面稳定爬行,适用于高空电缆、桥梁钢索等基础设施的自动化巡检与维护,显著提升作业安全性和效率。


踝关节康复新突破:仿生绳索机器人精准复现人体螺旋运动
河北工业大学团队在《IEEE TBME》发表突破性研究,开发了一款仿生绳索驱动踝关节康复机器人。该机器人基于螺旋理论,精准复刻踝关节复杂的瞬时螺旋运动,通过绳索与滑轮系统模拟肌肉与肌腱的柔顺牵引,避免了传统刚性机器人的不适与二次伤害。优化后活动范围大幅提升,人机协同实验显示误差仅±2°,为踝关节康复提供了更安全、高效的解决方案。

高精度相对定位助力香港中文大学“蜗牛”模块化机器人灵活组队
香港中文大学研究团队为SnailBot模块化机器人开发了一套高精度相对定位系统,融合ArUco视觉标记、光流分析和IMU惯性测量技术,实现了机器人单元间厘米级的实时相对定位。该系统使这些形如蜗牛的机器人能够精确感知彼此位置与姿态,支持它们像磁铁一样分合组队,为复杂环境下的协作任务提供了关键技术支撑。

字节跳动推出StoryMem技术 解决AI视频角色走样问题
字节跳动与南洋理工大学联合推出StoryMem系统,通过创新的“混合记忆库”设计,为AI视频生成提供长期记忆能力,有效解决了角色走样和环境闪烁的行业难题。该系统基于高效算法,在保持角色形象和背景细节跨场景一致性的同时,显著提升了视频生成质量,已在开源平台发布供开发者使用。
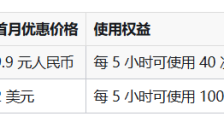
MiniMax发布M2.1编程模型 开启AI开发新纪元
MiniMax正式开源M2.1编程模型,现已上线Hugging Face、ModelScope及GitHub等平台,并获得vLLM的“Day-0”支持,实现高效推理。通过KTransformers技术,可在RTX5090等设备上进行FP8本地推理,提升运行效率。同时推出“Coding Plan”优惠活动,包括9.9元月度套餐和好友邀请折扣,降低开发者使用门槛,助力AI应用创新。

源 Yuan3.0Flash 开源多模态大模型引领 AI 新潮流
Yuan3.0Flash是一款开源的40B参数多模态基础大模型,采用创新的稀疏混合专家架构,显著降低算力消耗并提升推理准确性。模型支持二次开发,在企业应用中已超越GPT-5.1,在多模态检索和表格理解等任务上表现优异,有效降低AI应用成本。

浙大机械学院Grasp Lab以AI革新机器人抓取技术
浙江大学Grasp Lab研发的GL-Robot复合多连杆二指夹爪,通过‘AI+mechanism’深度融合,在手机构优化、无传感力感知和智能规划三大维度实现突破。其创新性验证了灵巧手与触觉感知可解耦,无需昂贵传感器即可实现高精度力控,为机器人抓取提供了低成本、高适应性的新解决方案。







