

资讯

英伟达发布SONIC模型 人形机器人动作更拟人
英伟达SONIC框架通过700小时人体动作数据训练和4200万参数模型,实现了人形机器人的通用控制。该技术突破传统单一动作训练模式,支持跑步、跳跃、拳击等全场景自然动作,并能通过视频、文本、音乐等多种模态进行跨模态控制,无需重复训练即可灵活响应。
仅需0.73秒!Unitree G1机器人随指令起舞打太极
本文介绍了TextOp框架如何实现人形机器人通过文本指令实时控制运动的技术突破。该系统允许用户在机器人执行动作过程中随时输入新命令,实现平滑过渡,平均响应时间仅0.73秒。文章详细解析了其双级协作架构、实测性能数据以及广泛的应用场景,展示了从实验室到实际落地的潜力。

无腿机器人突破两栖极限 跳跃游泳负重40倍体重
哈工大研究团队在《Science Advances》发表突破性成果,成功研制出纯惯性驱动的无腿两栖机器人Leglessbot。该机器人采用全密封刚性外壳和单一驱动器,无需外露运动部件即可实现跳跃、奔跑和游泳多模态运动。在沙地上速度可达1.4倍体长每秒,负载能力高达40倍自重,水中通过被动鳍片实现灵活转向。这一设计为厘米级机器人在恶劣环境下的应用提供了全新解决方案。

北大团队在芯片领域实现1纳米功耗最低突破
北京大学电子学院邱晨光-彭练矛团队在非易失性存储器领域取得重大突破,成功研制出物理栅长仅1纳米、工作电压低至0.6V的铁电晶体管,能耗降至0.45 fJ/μm,为国际上尺寸最小、功耗最低的铁电晶体管。该成果有望解决AI芯片中逻辑与存储电压不匹配的瓶颈,提升算力和能效,相关研究发表于《科学·进展》。
VLA技术路线能否成功?
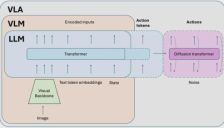
本文探讨了视觉语言动作模型(VLA)在机器人领域的发展前景与挑战。文章分析了VLA面临的核心问题,包括机器人数据采集的规模限制、仿真与现实的差距、暴力堆参数方法的局限性,以及VLA与成熟视觉语言模型(VLM)在输出空间、反馈机制和时序依赖上的本质差异。通过深入剖析数据鸿沟、物理因果需求和技术瓶颈,引发了对VLA技术路线可行性的关键思考。


KAIST与UC Berkeley团队为VLA模型赋予记忆 实测成功率提升一倍
KAIST和UC Berkeley团队提出的HAMLET框架为视觉-语言-动作模型添加了历史记忆能力,解决了机器人在长时任务中因缺乏上下文而失败的问题。该轻量级插件通过时刻令牌和记忆模块整合关键历史信息,无需从头训练大模型,即在真实场景任务中将成功率提升高达47.2%,同时保持高效推理速度。

京东发布 JoyAI-LLM-Flash 大模型,引领AI技术突破
京东于2月14日在Hugging Face平台开源了其最新大模型JoyAI-LLM-Flash,该模型总参数48亿,采用混合专家架构,支持128K上下文长度。通过创新的FiberPO优化框架和Muon优化器,解决了模型扩展的不稳定问题,提升了训练效率和应用潜力,展现了在知识理解、推理和编程方面的卓越能力。

哈佛大学发布新型软体机器手 旋转多材料3D打印技术获突破
哈佛大学研究团队在Advanced Materials上发表创新研究,提出旋转多材料3D打印(RM-3DP)新方法,用于制造具有复杂可编程形变能力的软体机器人。该技术通过动态控制内部气动通道的方向和尺寸,实现了从一维长丝到二维表面的精确驱动,成功打印出可抓握的机器手和会开花的机器花朵,为软体机器人的高效制造开辟了新途径。

大象机器人产品助力科研取得重大突破
大象机器人产品助力全球顶尖科研机构取得突破性成果,其机械臂产品被应用于康奈尔大学等团队的创新研究中,相关论文荣登《Science Robotics》期刊封面。研究聚焦精准农业等前沿领域,通过软体机器人实现自动化叶面增强,成功率达91%以上,推动了植物生物工程与高通量表型分析的技术革新。

机器人仿生瞳孔技术突破:液态金属模仿猫羊乌贼,强光识别率提升15%
北卡罗来纳大学教堂山分校与西湖大学团队在《Science Robotics》发表突破性研究,开发出基于液态金属的仿生自适应瞳孔反射视觉系统。该系统能模拟猫、羊、乌贼等多种动物的瞳孔形状,在强光下自主收缩,将图像识别精度提升15%,为机器人视觉带来硬件层面的代际跨越。

香港中文大学任洪亮团队创新人工动觉框架 走出视觉依赖桎梏
香港中文大学任洪亮团队在《Nature Reviews Bioengineering》发表评论文章,提出人工动觉分层框架,旨在解决当前手术机器人过度依赖视觉的局限。该框架通过物理感知、算法解读和协同控制三个层次,让机器人能够感知器械受力、组织硬度等物理互动,实现类似人类外科医生的多感官协同能力,为下一代智能手术机器人的自主性和适应性奠定基础。

EPFL实现机器人集体续命技术
瑞士洛桑联邦理工学院(EPFL)在《Science Robotics》发表研究,提出一种创新的本地资源共享方法论,使模块化机器人的系统可靠性随模块数量增加而提升。该研究通过共享电力、通信和感知三种关键资源,实现了即使模块完全失效也能依靠邻居模块恢复功能,显著增强了机器人集体的适应性和韧性。
中科第五纪联合中科院自动化所发布BridgeV2W 机器人预演未来技术
中科第五纪联合中科院自动化所团队推出BridgeV2W,通过创新的具身掩码技术,将机器人动作渲染为像素级的动作剪影,解决了视频生成模型与机器人动作表征之间的鸿沟。该方法实现了动作与画面的精准对齐、视角自适应和跨机器人平台的通用性,让机器人能够可靠地预演未来动作,并在多场景实验中展现出卓越的泛化能力和下游任务应用价值。

EPFL实现机器人集体共享续命技术
瑞士洛桑联邦理工学院(EPFL)在《Science Robotics》上发表创新研究,提出了一种本地资源共享方法论,使模块化机器人的系统可靠性随模块数量增加而提升。研究通过电力、通信和感知三种资源的共享,实现了即使模块完全失效也能依靠邻居模块恢复功能,显著增强了机器人集体的适应性和韧性。

机器人打造动态墙面艺术 家居每天焕新颜
本文介绍了普林斯顿大学等机构在《Science Robotics》上发表的突破性研究——‘群体花园’模块化机器人立面系统。该系统灵感源于自然界的群体智能,让建筑墙面由众多小型机器人单元组成,能够集体感知光线、与人互动,实现智能遮阳和动态艺术表达,预示着未来建筑将成为能适应环境、响应需求的‘活’的伙伴。







